
:quality(80)/p7i.vogel.de/wcms/31/e1/31e19bb8d1057f4dfbdc5cb36f465bc1/0132596426v4.jpeg "Magnetfusion: Querschnitt eines künftigen Fusionskraftwerks mit dem mehr als 100 Mio. °C heißem Plasma. (Bild: ITER)")
:quality(80)/p7i.vogel.de/wcms/96/48/964839e1c3bc52656751b8ff34d136ef/0132406899v2.jpeg "Der Zilog Z80 war das Herzstück der ersten erfolgreichen britischen Heimcomputer, dem Sinclair ZX80 und ZX81 (hier zu sehen in der amerikanischen Variante Timex Sinclair 1000). Der vom ehemaligen Intel-Ingenieur Federico Faggin entworfene Chip war neben dem MOS6502 einer der bedeutendsten Prozessoren des frühen Heimcomputer- und Konsolen-Zeitalters. (Bild: Marco Tangerino)")
:quality(80)/p7i.vogel.de/wcms/74/c7/74c76b0e1aa72b1dd8b08efff6cc77b6/0132360506v2.jpeg "Mona Neubaur, Ministerin für Wirtschaft, Industrie, Klimaschutz und Energie des Landes Nordrhein-Westfalen, und Thomas Jarzombek, Parlamentarischer Staatssekretär im Bundesministerium für Digitales und Staatsmodernisierung, besuchten den Standort in Düsseldorf. (Bild: Kontron AG)")
:quality(80)/p7i.vogel.de/wcms/3a/d5/3ad53c1b48bdc1b08c50636c23a6b082/0132577934v2.jpeg "Die Verantwortlichen von Globalfoundries planen mit weiteren Geldern aus dem CHIPS Act. (Bild: Globalfoundries)")
:quality(80)/p7i.vogel.de/wcms/4d/67/4d6714467e645994e640e40607ede7b2/0132619855v2.jpeg "Das aktuelle LPDDR5-CAMM2-Modul von Apacer verspricht extrem niedrigen Energieverbrauch, Übertragungsgeschwindigkeiten von bis zu 8.533 MT/s und die Unterstützung hoher Kapazitäten. (Bild: Apacer)")
:quality(80)/p7i.vogel.de/wcms/29/43/294303043b2876bc45b7b656f17ca002/0132607853v2.jpeg "KI-Implementierung in der Industrie: Warum das Gros des Aufwands in der Datengrundlage liegt. (Bild: Gemini / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/73/73/7373bcc26c7bb7eb5f3390abb0629259/0132469919v2.jpeg "Nicht jeder Prozess braucht einen Agenten – oft entsteht der größte Mehrwert erst aus dem klugen Zusammenspiel von Agentic AI und klassischer Automatisierung (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/06/45/0645f948ced302c06cd2a4b577ee2934/0132459906v2.jpeg "Mistral und Microsoft erweitern die Partnerschaft, um souveräne KI für Unternehmen und regulierte Branchen anzubieten. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/8a/94/8a948c57a2a7bef7f0164d0c3c00436e/0132488005v2.jpeg "Die drei neuen Touch Display 2 der Raspberry Pi Foundation in 10, 7 und 5 Zoll. (Bild: Raspberry Pi Foundation)")
:quality(80)/p7i.vogel.de/wcms/96/07/960754732580630cbf6cc00859ff1a55/0132396637v2.jpeg "Technologievielfalt: Verfügbar in 4G Cat 4, 5G RedCap und 5G für unterschiedliche Leistungs- und Kostenprofile (Bild: Spectra)")
:quality(80)/p7i.vogel.de/wcms/46/41/464103e89109fbe52aaf3efc1a8311d9/0130524209v2.jpeg "Humanoide Roboter: Roboter, die vor wenigen Jahren noch eine Vision waren, sind heute dank KI, maschinellem Lernen und Echtzeit-Datenverarbeitung Realität. (Bild: Pete Linforth)")
:quality(80)/p7i.vogel.de/wcms/44/e3/44e37fbf6c0b6632c810bf18d55f2cf4/0132606362v3.jpeg "Die Lithium-Ionen-Akkus im AA- und AAA-Format liefern eine konstante Ausgangsspannung von 1,5 V und sind für Anwendungen mit hohem Energiebedarf oder empfindlicher Spannungsversorgung ausgelegt. (Bild: ANSMANN AG)")
:quality(80)/p7i.vogel.de/wcms/1a/f4/1af4bbbf9afea7b3aea37863c44fd0cd/0132598217v8.jpeg "Power Briefing: Die wichtigsten Entwicklungen aus Leistungselektronik, Stromversorgung und Power-Management – kompakt eingeordnet. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/8a/2e/8a2e7d2a89ffe55c545dd6c831ed154e/0132246788v2.jpeg "Über 500 Teilnehmer, 120 Referenten: Die FPGA Conference Europe platzte in diesem Jahr aus allen Nähten – und wurde ihrem Anspruch als Leitkongress der FPGA-Welt einmal mehr gerecht. (Bild: Tobi Giessen)")
:quality(80)/p7i.vogel.de/wcms/06/a1/06a158e32b18d99fcea65547cec5d4c7/0132069489v2.jpeg "Mit direkter Integration von Speicher ins Chip-Package verspricht AMD mit dem Versal Premium Gen 2 SoC eine schnellere Datenübertragung, verringerte Latenz und einem potentiell geringere Stromverbrauch. (Bild: AMD)")
:quality(80)/p7i.vogel.de/wcms/86/2a/862afb1de8423bb7401098a2fd268281/0131792672v2.jpeg "Bild 1: Ein Spannungsversorgungskonzept für Lasten, welche eine vorgegebene Ein- und Abschaltreihenfolge (Sequencing) benötigen. (Bild: ADI)")
:quality(80)/p7i.vogel.de/wcms/14/d7/14d7cb77132e76f852e71edf06cc94fb/0131803730v2.jpeg "Tom Trill, CEO von Qualinx, und Dr. Manfred Horstmann, Senior Vice President und General Manager bei GlobalFoundries (Bild: Globalfoundries)")
:quality(80)/p7i.vogel.de/wcms/c1/c1/c1c1c1400ca9ed92b11d2c9744570fc5/0132605401v1.jpeg "Bewährte Security Design Principles zeigen, wie sich Embedded-Systeme von Beginn an resilienter, modularer und wirksam gegen Cyberangriffe absichern lassen. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/f7/9a/f79a88746d596c9bb948de48f9d988a7/0132575777v2.jpeg "Auch Synopsys zeichnet für EDA eine Zukunft mit autonom agierenden KI-Agenten. (Bild: Synopsys)")
:quality(80)/p7i.vogel.de/wcms/79/f5/79f5c6a1d253a9df4e9e8cb1ce409494/0132631726v2.jpeg "Herzstück der Optimierung: Die Integration von Göpel-Hardware wie dem „SCANBOOSTER II“ und entsprechenden TEM-Modulen ermöglichte das schnelle Flashen via SPI-Interface. (Bild: Göpel electronic)")
:quality(80)/p7i.vogel.de/wcms/13/49/1349c55b984d290b16bb695fdfe84344/0132590130v2.jpeg "Symbolbild: Thermische Wechselbelastungen können die Anbindung einer Durchkontaktierung an die Innenlagen schädigen. Der IST erfasst den Defekt über die Veränderung des elektrischen Widerstands. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/91/1f/911fdaf2ab3aa492f73d11f2a3df8a0e/0132493905v2.jpeg "Zugriff auf Mathematik, Spektrum und weitere Werkzeuge des MXO-Oszilloskops während der 3-Phasen-Leistungsanalyse. (Bild: Rohde & Schwarz)")
:quality(80)/p7i.vogel.de/wcms/5b/67/5b6756aa65e98b0139a1d2f36d691730/0132493679v2.jpeg "Moderne Fahrzeuge erzeugen mit Wechselrichtern und Schaltnetzteilen ein anspruchsvolles EMV-Umfeld. In einem solchen Umfeld stößt die Kupferverkabelung an ihre Grenzen. (Bild: Keysight)")
:quality(80)/p7i.vogel.de/wcms/64/01/640144381a68a4cd487d14640ef3e6cf/0132588612v2.jpeg "GoodBytz: Die Gewinner des Robotics Award 2026 (Bild: Deutsche Messe AG)")
:quality(80)/p7i.vogel.de/wcms/33/69/33691b30831634b9a50073d37805a209/0132579697v3.jpeg "Die „Kindheit“ der Roboter: Strukturierte Trainingsumgebungen liefern die entscheidenden Praxisdaten, die KI-Modelle für eine verlässliche Autonomie benötigen. (Bild: Gemini / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/84/1c/841ccf595b18da0bd554e66eca68bda3/0132636244v2.jpeg "Kommen Sie zum 24. Würzburger EMS-Tag und erfahren Sie mehr über KI in der Fertigung. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/6d/94/6d945f891a55aebb5698d9a3b30934c5/0132634767v2.jpeg "Symbolbild: Leiterplattenpanel vor einer Galvanikanlage. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/f0/8f/f08fd9d30c619d093d90848a126ea4da/0132621623v2.jpeg "Das neue Bauteil im Keystone-Sortiment nimmt Glassicherungen der Größe 5 mm × 20 mm auf . (Bild: Keystone)")
:quality(80)/p7i.vogel.de/wcms/af/0e/af0e2f82073b1723a565686b73751dd9/0132625709v2.jpeg "Symbolbild: Nach der Insolvenz sollen wesentliche Bereiche der Antriebstechnik von Saftig fortgeführt werden. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/3e/e0/3ee0d85db293635217ab5de1ad0b8483/0132622048v2.jpeg "Plant Intel, künftig Lizenzen der hauseigenen x86-Architektur an Fabless-Prozessorhersteller zu vergeben? Medienberichten zufolge hat das Unternehmen den RTL-Code einer seiner Atom-Prozessorkerne an ein frisch gegründetes Start-up lizenziert. Über die Generation des Prozessors oder genauere Details zur Lizenzvergabe ist derzeit noch nichts bekannt. (Bild: Intel)")
:quality(80)/p7i.vogel.de/wcms/d7/12/d7124bb0ead39d706454820e3efe3e17/0132610698v2.jpeg "Kimi K3 lässt sich damit grundsätzlich selbst hosten. Wegen seiner Größe ist das jedoch kein Modell für beliebige Unternehmen: Selbst in komprimierter Form sind umfangreiche Speicher- und Rechenressourcen erforderlich. (Bild: Moonshot AI)")
:quality(80)/p7i.vogel.de/wcms/4e/41/4e4159d1e93e67d47bd2f51a90691b23/0131548978v2.jpeg "Transformation im Engineering: KI-gestützte Systeme generieren zunehmend selbstständig Schaltschranklayouts und entlasten Konstrukteure von zeitraubenden Routineaufgaben. (Bild: WSCAD)")
:quality(80)/p7i.vogel.de/wcms/d6/ea/d6eac438c362c545cab42ef0f30bcfc0/0130136975v2.jpeg "Die Bewerbungsphase für den James Dyson Award 2026 ist gestartet. (Bild: Dyson)")
:quality(80)/p7i.vogel.de/wcms/e5/6c/e56ceb935ba09cb66a4fd0f961b2d3e9/0129642888v2.jpeg "(Bild: Vogel Professional Education)")
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/93300/93330/65.jpg "EBV_Vekt4c_Subline_3d.jpg ()")
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/68800/68851/65.jpg "Logo.jpg ()")
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/111200/111228/65.jpg "RECOM_Logo.jpg ()")
Schaltungsaufbau rund um den Controller
Für die Erzeugung des SCI-Taktes (Serial Communication Interface) wird das PLL-Modul mit dem Takt des internen Oszillators beaufschlagt. Die Ausgangsfrequenz beträgt 192 MHz. Diese wird dann durch zwei geteilt, um den Peripherietakt von 96 MHz zu gewinnen. Der Baudratengenerator des SCI nutzt diesen 96-MHz-Takt für eine Kommunikation mit bis zu 6 MBit/s.
Die Schaltung rund um den Controller besteht aus folgenden Komponenten:
- JTAG-Schnittstelle zum Programmieren des im Controller integrierten Flashspeichers und zum Debuggen von Softwareanwendungen. Für die JTAG-Schnittstelle sind vier Pins am Controller vorgesehen: TDI, TDO, TMS und TCK
- Drei PWM-Kanäle übernehmen über Feldeffekttransistoren die Ansteuerung des Schaltwandlers für die Stromversorgung der LEDs
- Acht I/Os werden für die Adressierung und die Konfiguration des Systems genutzt
- Drei Eingänge des A/D-Wandlers werten den Stromfluss durch die LEDs aus
- Die Verbindung der seriellen Kommunikationsschnittstelle mit einem RS-485-Transceiver wird über drei Anschlüsse hergestellt: Tx, Rx sowie einen Universal-I/O für Data Enable
Wie die LED angesteuert wird
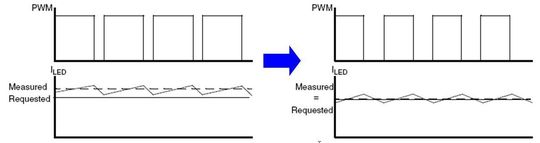
Die LEDs werden über einen DC-DC-Schaltwandler versorgt, der in Step-Down-Konfiguration arbeitet. Mithilfe dieser Schaltung kann die Eingangsspannung von 5 Volt auf einen geringeren Wert reduziert werden, mit dem dann über die PWM_Module des Controllers die entsprechende LED-Vorwärtsspannung eingestellt wird.
Um die Leuchtfarbe der LED zu kontrollieren, wird der Eingang des A/D-Wandler-Moduls mit Sensorwiderständen verbunden, die mit der LED in Reihe geschaltet sind. Der Controller tastet die Werte des A/D-Wandlers ab und berechnet den durch die LED fließenden Strom. Daraus bestimmt er dann, ob das Tastverhältnis des PWM nachgeregelt werden muss.
Die Adressierung der Pixel
Auf jede Pixelplatine kann unabhängig von den anderen zugegriffen werden. Es gibt verschiedene Alternativen für die Realisierung des Adressschemas für die Pixelplatine, und jeder haften ihre eigenen Vor- und Nachteile an. Am einfachsten lässt sich das Problem über einen an die Controller-I/Os angeschlossenen Hardware-DIP-Schalter lösen.
Der Controller liest den Zustand dieser Pins und bestimmt daraus beim Softwarestart seine Adresse in der Pixelmatrix. Eine Alternative wäre, fest codierte Adressen auf dem internen Flashspeicher des DSC oder einen Algorithmus auf dem Network-Master zu verwenden, über den jeder Platine ihre Adresse dynamisch zugewiesen wird.
Dabei sollte sichergestellt sein, dass das gewählte Adressierungsverfahren die Anforderungen der Applikation erfüllt, also beispielsweise eine ausreichende Zahl von Pixelplatinen für die Matrix unterstützt.
Netzwerkschnittstelle: Kommunikation der Pixelplatinen
Bei der Realisierung des Protokolls für die Kommunikation zwischen den Pixelplatinen müssen unterschiedliche Applikationsanforderungen berücksichtigt werden: Beispielsweise der Abstand der Platinen zueinander und die über den Kommunikationskanal abzuwickelnde Datenrate.
Für diese Aufgabe kommen spezielle Lichttechnikprotokolle wie auch eigene Lösungen in Frage. In unserem Beispiel setzen wir für die physikalische Verbindung den RS-485-Standard ein. Darauf setzt dann ein proprietäres Messageprotokoll auf. RS-485 ist ein Industrieprotokoll für Simplex- und Halbduplex-Betrieb. Das Signal wird über eine zweiadrige Leitung mit den Adern A und B übertragen.
Mit einigen RS-485 Transceivern lassen sich bis zu 20 MHz bewältigen. Der von RS-485 angebotene differenzielle Betrieb, durch den Störungen minimiert werden können, erweist sich als weiterer Pluspunkt.
Hardwareunabhängig durch Softwareblöcke
Die Software wurde in einfache Module unterteilt, die jeweils über eine bestimmte Funktionalität oder Funktion verfügen. Durch diesen modularen Ansatz in verschiedene Softwareblöcke kann hardwareunabhängig konzipiert werden. So kann der Softwarecode einfach auf andere Controller portiert werden.
Für einen Hersteller von Lichttechnikprodukten kann es sich als vorteilhaft erweisen, für mehrere Hardwareplattformen auf die gleiche Software zurückgreifen.
Die modulare Struktur sorgt darüber hinaus für ein einfacheres Testen in der ersten Entwicklungsphase, da die Softwaremodule unabhängig von einander getestet werden können.
Insgesamt wurde die Applikationssoftware in sechs verschiedene Module aufgegliedert. Jedes einzelne Modul wird durch eine C-Sourcedatei und eine entsprechende Headerdatei beschrieben.
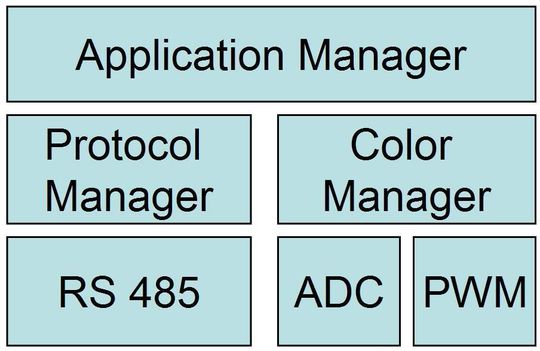
Die hardwareabhängigen Low-Level-Routinen, die auf die Peripheriemodule des Digitalen Signal Controllers wie SCI, A/D-Konverter und Pulsbreitenmodulation zugreifen, werden in unten stehendem Diagramm durch die Blöcke RS-485, ADC und PWM repräsentiert.
Die Steuerungsfunktionen werden in den Protocol-Manager- und Color-Manager-Dateien realisiert. Der Application-Manager schließlich ruft diese einzelnen Steuerungsfunktionen auf.
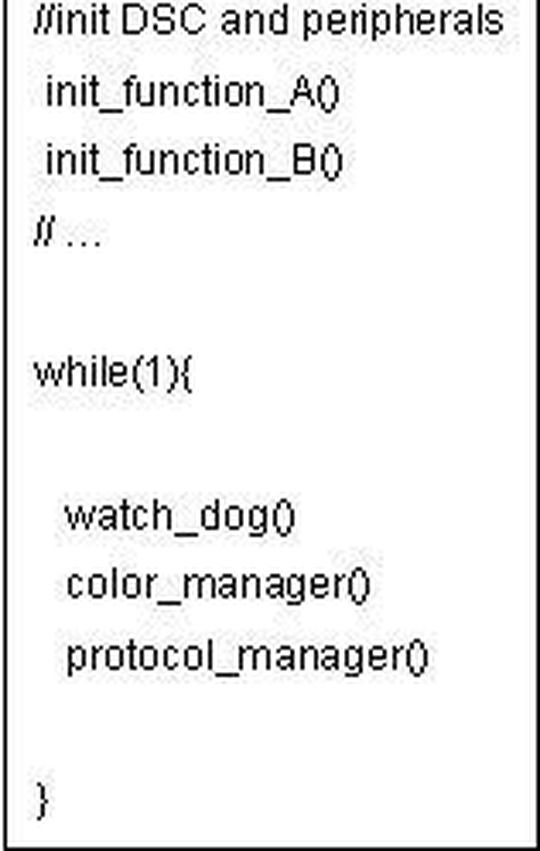
- Application Manager: Seine Hauptaufgabe besteht darin, Initialisierungsfunktionen und einzelnen Tasks der Applikation aufzurufen.
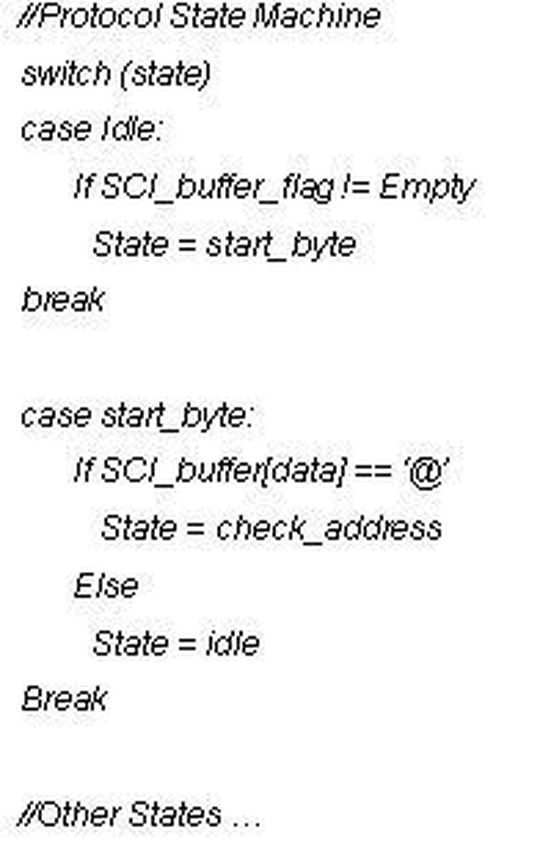
- Protocol Manager: Er liest die über die serielle Kommunikation ankommenden Daten und übernimmt deren Auswertung. Außerdem dekodiert er die empfangenen Messages und speichert nach einer Gültigkeitsprüfung Parameter im Speicher ab oder leitet Befehle an den Color Manager weiter.
- Color Manager: Er wertet die Eingänge des A/D-Wandlers kontinuierlich aus und berechnet, ob Änderungen am Tastverhältnis des PWM erforderlich werden, um den gewünschten Farbton einzustellen. Daneben empfängt er Messages vom Protocol Manager, die eine Änderung der gewünschten Farbe vorgeben. Der Algorithmus für die Farbtonerkennung ist aus unserer Sicht das wichtigste Knowhow, auf das sich der Lichttechnikhersteller konzentrieren sollte. Bewegungs- und Effektroutinen könnten auf dieser Ebene eingefügt werden.
Drei wesentliche Low-Level-Funktionen
Wir müssen drei Low-Level-Funktionen realisieren: RS-485, PWM und A/D. Dafür lassen sich die I/O-Pins bzw. Peripheriemodule des DSC nutzen. Die Funktionen kommunizieren mit den Steuerungsalgorithmen über gemeinsame Variablen, die mithilfe von Interrupt-Serviceroutinen aktualisiert werden.
Die RS485-Funktion hängt am SCI-Modul und generiert jedes Mal einen Interrupt, wenn ein Byte empfangen wird. Die Daten werden dann in einem Puffer zwischengespeichert, und wenn der Protocol Manager ausgeführt wird, prüft dieser den Status dieses Puffers und gibt die Daten aus.
Ist eine Analog-Digital-Wandlung abgeschlossen, generiert der ADC einen Interrupt. Anschließend speichert dieser die Daten in einem Puffer zwischen und fordert einen neuen Abtastwert für einen anderen Kanal an: Rot, Grün oder Blau.
Durch eine ständige Umschaltung seiner Kanäle füllt der ADC die Puffer für die drei Farben mit A/D-Abtastwerten, die dann gefiltert und vom Color Manager weiterverarbeitet werden. Und schließlich stellt die PWM-Funktion den entsprechenden PWM-Kanal des DSC auf das vom Color Manager berechnete Tastverhältnis ein.
Der Test des Systems
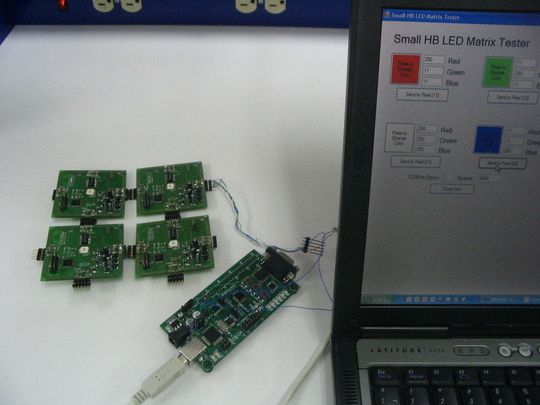
Wir haben vier Prototypen der Pixelplatine gebaut, um das in diesem Artikel beschriebene Konzept zu testen und zu validieren, und diese zu einer kleinen, jederzeit erweiterbaren Matrix zusammengefügt. Diese haben wir schließlich über eine zwischengeschaltete Gatewayplatine per USB-Kabel an einen PC angeschlossen. Die auf dem PC laufende Software greift über den USB-Port auf das System zu und sendet die benötigten Daten zur Steuerung der Matrix-LEDs.
Gerade bei Lichttechnikanwendungen dieser Klasse ist es wichtig, Kosten und Funktionalität in die richtige Relation zueinander zu setzen. Hard- und Software müssen von Anfang an gründlich geplant und strukturiert werden, um Freiräume ebenso wie eine flexible Abstimmung auf die jeweiligen Bedürfnisse der Applikation zu gewährleisten und um das Design beispielsweise in unterschiedlichen Plattformen wieder verwenden zu können.
Die gewählten Protokolle und Algorithmen stellen quasi das Herz der Applikation dar und ermöglichen eine zusätzliche Differenzierung, selbst wenn Projekte in der Lichttechnik keine besonderen Anforderungen voraussetzen; wollen wir aber komplexere Aufgaben lösen, so sollten wir entsprechende Leistungsreserven in der Hinterhand haben.
Die Wahl des richtigen Controllers für die Applikation spielt eine wichtige Rolle für die Zukunftsfähigkeit des Designs. Der hier eingesetzte Digitale Signal Controller MC56F8006 von Freescale wird mit seinen Peripheriefunktionen und den verfügbaren Toolsets allen Bedürfnissen gerecht.
*Renato Frias ist Applikationsingenieur bei Freescale Semiconductor in München.
(ID:321658)
:quality(80)/p7i.vogel.de/wcms/ac/a9/aca924f5aeb2280243c679915eb60213/0129344939v2.jpeg "Embedded-Modul TQMa67xxL: leistungsstarke Bildverarbeitung, KI-Unterstützung und flexible Schnittstellen ermöglichen zahlreiche Smart-City-Anwendungen. (Bild: TQ-Group)")
:quality(80)/p7i.vogel.de/wcms/f1/ee/f1ee410f2d37b6207679d4f28311acb4/0127092950v2.jpeg "Bild 1: Die Implementierung des smarten Transmitters. (Bild: ADI)")