
:quality(80)/p7i.vogel.de/wcms/74/c7/74c76b0e1aa72b1dd8b08efff6cc77b6/0132360506v2.jpeg "Mona Neubaur, Ministerin für Wirtschaft, Industrie, Klimaschutz und Energie des Landes Nordrhein-Westfalen, und Thomas Jarzombek, Parlamentarischer Staatssekretär im Bundesministerium für Digitales und Staatsmodernisierung, besuchten den Standort in Düsseldorf. (Bild: Kontron AG)")
:quality(80)/p7i.vogel.de/wcms/22/0a/220a84ba1b9977d26fb4a212af5c8fec/0132339629v2.jpeg "Imec und Diraq haben erstmals den kohärenten Betrieb und die Auslesung eines linearen Arrays aus acht Silizium-MOS-Spin-Qubits demonstriert. (Bild: Imec)")
:quality(80)/p7i.vogel.de/wcms/f5/79/f579ee1713cb8c500cc5d5005c2fb3da/0132337035v3.jpeg "Einsatz auf dem Acker: Wie sich humanoide Systeme mit schweren landwirtschaftlichen Maschinen vernetzen lassen, wird in Ilmenau erprobt. (Bild: Fraunhofer IOSB)")
:quality(80)/p7i.vogel.de/wcms/29/d9/29d92f3af3eb63361cd39a3d2e456a53/0132389956v2.jpeg "TE erweitert sein aktuelles Finepitch-Portfolio um einen Steckverbinder mit einem Rastermaß von 1,27 mm. (Bild: TE Connectivity)")
:quality(80)/p7i.vogel.de/wcms/7a/2c/7a2c782274dd2420ffb3b14e17585773/0132304402v2.jpeg "Swissbit und Nexperia gehen Hand in Hand: Sichere Speicher und robuste Halbleiter sollen zuverlässige KI- und Cloud-Infrastrukturen bieten. (Bild: Canva / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/e3/e0/e3e0e9b34c054cd1de2891ccb822ebe6/0132235494v2.jpeg "Bild 1: Der etwa 30 Meter große Ballonsatellit Echo 1 bei einem Aufblastest in einer Halle der NASA. (Bild: NASA)")
:quality(80)/p7i.vogel.de/wcms/d0/b9/d0b92ad1ff97275bd7511a42be1758ec/0132135985v1.jpeg "Erst anschnallen, dann losfahren: Beim EU AI Act zahlt sich Vorsorge aus. Wer frühzeitig Schutzmaßnahmen etabliert, vermeidet Bußgelder und Reputationsschäden. (Bild: © Olga Ко - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/5c/47/5c47a19196fe05757947f2daddf8fa72/0132292701v1.jpeg "Symbolbild aus Berlin-Mitte: Die Bürgerinitiative Rechenzentrum Kronstorf hat für den 17. Juli eine Demonstration gegen den geplanten Ausbau des Google-Rechenzentrums angekündigt. (Bild: F* Google / Hossam el-Hamalawy / CC BY-SA 2.0 / flickr.com)")
:quality(80)/p7i.vogel.de/wcms/7b/da/7bda6a80466f1a5de0f4b60346b6f2b3/0132242139v5.jpeg "KI: Die große Black-Box in der Fabrik (Bild: Lucid Origin / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/96/07/960754732580630cbf6cc00859ff1a55/0132396637v2.jpeg "Technologievielfalt: Verfügbar in 4G Cat 4, 5G RedCap und 5G für unterschiedliche Leistungs- und Kostenprofile (Bild: Spectra)")
:quality(80)/p7i.vogel.de/wcms/46/41/464103e89109fbe52aaf3efc1a8311d9/0130524209v2.jpeg "Humanoide Roboter: Roboter, die vor wenigen Jahren noch eine Vision waren, sind heute dank KI, maschinellem Lernen und Echtzeit-Datenverarbeitung Realität. (Bild: Pete Linforth)")
:quality(80)/p7i.vogel.de/wcms/89/17/8917ac8f43a91e8e6eebdd301d00bf4e/0132223314v5.jpeg "Der Kongress „Power of Electronics“ vermittelt praxisnahes Wissen rund um das Power Design – von Magnetik und Stromversorgungen bis hin zu EMV und aktuellen Entwicklungen in der Leistungselektronik. (Bild: Stefan Bausewein)")
:quality(80)/p7i.vogel.de/wcms/28/3e/283eb7efa47f9d481b361d765f774890/0132340824v2.jpeg "Die Differenzierung im Bereich der SiC-MOSFETs findet nicht mehr ausschließlich auf dem Datenbaltt statt. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/f4/09/f4093b623fb87b18750f2f69a0e986b3/0132332557v3.jpeg "Demonstrator eines bidirektionalen einphasigen 3-kW-DC-Ladegeräts mit GaN-Leistungselektronik. Das leistungselektronische Modul (oben) haben Forschende des Fraunhofer IAF auf Basis des Leistungshalbleiters Galliumnitrid (GaN) und alternativen isolierenden Substraten entwickelt. Die Realisierung des Demonstrators sowie die Integration des Moduls erfolgte durch den GaN4EmoBiL-Projektpartner Ambibox. (Bild: Fraunhofer IAF)")
:quality(80)/p7i.vogel.de/wcms/8a/2e/8a2e7d2a89ffe55c545dd6c831ed154e/0132246788v2.jpeg "Über 500 Teilnehmer, 120 Referenten: Die FPGA Conference Europe platzte in diesem Jahr aus allen Nähten – und wurde ihrem Anspruch als Leitkongress der FPGA-Welt einmal mehr gerecht. (Bild: Tobi Giessen)")
:quality(80)/p7i.vogel.de/wcms/06/a1/06a158e32b18d99fcea65547cec5d4c7/0132069489v2.jpeg "Mit direkter Integration von Speicher ins Chip-Package verspricht AMD mit dem Versal Premium Gen 2 SoC eine schnellere Datenübertragung, verringerte Latenz und einem potentiell geringere Stromverbrauch. (Bild: AMD)")
:quality(80)/p7i.vogel.de/wcms/86/2a/862afb1de8423bb7401098a2fd268281/0131792672v2.jpeg "Bild 1: Ein Spannungsversorgungskonzept für Lasten, welche eine vorgegebene Ein- und Abschaltreihenfolge (Sequencing) benötigen. (Bild: ADI)")
:quality(80)/p7i.vogel.de/wcms/14/d7/14d7cb77132e76f852e71edf06cc94fb/0131803730v2.jpeg "Tom Trill, CEO von Qualinx, und Dr. Manfred Horstmann, Senior Vice President und General Manager bei GlobalFoundries (Bild: Globalfoundries)")
:quality(80)/p7i.vogel.de/wcms/42/05/4205a77daea554e39c03c398bc80be76/0132134554v1.jpeg "Das ist das System aus Deutschland, das Europa in Sachen Cybersicherheit bei vernetzen Geräter aller Art Souveränität und Transparenz geben soll: Das Fraunhofer-„RISC-V Secure Element“. Hier mehr dazu ... (Bild: Fraunhofer IIS / J. Ernst)")
:quality(80)/p7i.vogel.de/wcms/f1/17/f1176c05616af1272eb5d7f9e4454291/0132149039v2.jpeg "Smart Home: Smarte Geräte werden immer beliebter. Doch das Sicherheitsrisiko bleibt. (Bild: Pete Linforth)")
:quality(80)/p7i.vogel.de/wcms/37/41/37411505b1035e75cc869d032a74e7ad/0132395233v2.jpeg "Zum 1. Juni 2026 hat der Mess- und Prüftechnikspezialist Meas-X den exklusiven Vertrieb und die strategische Weiterentwicklung der Software Dasylab übernommen. (Bild: Meas-X)")
:quality(80)/p7i.vogel.de/wcms/ae/ba/aeba60e0ac4a340666d1813ba55b509b/0132229220v2.jpeg "Die Gründer von QuantumDiamonds: Dr. Fleming Bruckmaier (links) und Kevin Berghoff (rechts) (Bild: Quantum Diamonds GmbH)")
:quality(80)/p7i.vogel.de/wcms/fb/60/fb600e7355d71b25f0b7ddf03c61a5a3/0132176619v2.jpeg "Vision Engineering zeigt die Produkte unter anderem auf der Euro Defence Expo in Halle 3 / 3A79 vom 22.bis zum 25.09.2026. (Bild: Vision Engineering)")
:quality(80)/p7i.vogel.de/wcms/2b/6b/2b6b15dd45ba688abde2aa441320b88c/0132065385v2.jpeg "Pilot S20: Er kam Ende der 1990er-Jahre auf den Markt und war die direkte Weiterentwicklung des allerersten Pilot-Systems von 1995. Mit dem Modell schaffte Seica den internationalen Durchbruch gegen die großen Player wie GenRad oder Teradyne. (Bild: Seica)")
:quality(80)/p7i.vogel.de/wcms/f5/ed/f5edad9780d21e15de469f4c0a0fba51/0132398920v2.jpeg "Künstliche Intelligenz in der Produktion: Praktische Anwendungsfälle zeigen, wie Machine Learning und generative Modelle in der industriellen Praxis reale Mehrwerte schaffen. (Bild: Lucid Origin / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/6f/b8/6fb892d99249695b745c8eead3a50d8e/0132358019v4.jpeg "98 Prozent richtig: Nach der Angabe des Unternehmens liegt die Quote nun einen Prozentpunkt unter dem menschlichen Niveau. (Bild: Xiaomi)")
:quality(80)/p7i.vogel.de/wcms/89/47/89474b733dda829cc0556f25369a0ffa/0132383686v2.jpeg "Knüpfen Sie im Rahmen des EFX-Speed-Datings powered by ELEKTRONIKPRAXIS neue Kontakt. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/2d/72/2d72ad8db013c74a1bac8c47fe10ada5/0132386600v2.jpeg "Der digitale Zwilling ermöglicht die realitätsnahe 1:1-Simulation der Bearbeitung. Komplexe Prozesse können so bereits im Vorfeld risikofrei optimiert werden. (Bild: DMG MORI)")
:quality(80)/p7i.vogel.de/wcms/71/e5/71e5e7b851dd407bda02104ffd23055b/0132366185v2.jpeg "Rüsten an der Bestücklinie: EPS will Fertigungsprozesse nicht nur technisch beherrschen, sondern für Kunden verlässlicher planbar machen. Dazu gehört für den EMS-Dienstleister auch, frühzeitig zu kommunizieren, wenn Termine oder Bauteile kritisch werden. (Bild: Susanne Kästner)")
:quality(80)/p7i.vogel.de/wcms/42/df/42dff62c518b703e4d810c8a559b9b98/0132338696v2.jpeg "Neue Zukunft für Automatisierungsingenieure: KI übernimmt Routineaufgaben, während tiefes Verständnis für Maschinen und Prozesse unerlässlich bleibt. (Bild: Rockwell)")
:quality(80)/p7i.vogel.de/wcms/4e/41/4e4159d1e93e67d47bd2f51a90691b23/0131548978v2.jpeg "Transformation im Engineering: KI-gestützte Systeme generieren zunehmend selbstständig Schaltschranklayouts und entlasten Konstrukteure von zeitraubenden Routineaufgaben. (Bild: WSCAD)")
:quality(80)/p7i.vogel.de/wcms/d6/ea/d6eac438c362c545cab42ef0f30bcfc0/0130136975v2.jpeg "Die Bewerbungsphase für den James Dyson Award 2026 ist gestartet. (Bild: Dyson)")
:quality(80)/p7i.vogel.de/wcms/e5/6c/e56ceb935ba09cb66a4fd0f961b2d3e9/0129642888v2.jpeg "(Bild: Vogel Professional Education)")
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/68800/68851/65.jpg "Logo.jpg ()")
Entwicklungswerkzeuge, die ein hartes Echtzeitsystem nicht in seiner Funktion beeinträchtigen und dem Entwickler dennoch Einblick ins Innere gewähren, sind schwierig zu realisieren, denn mal eben kurz einen Breakpoint zu setzen geht dann nicht mehr. Bei weichem Echtzeitverhalten kann manchmal schon durch Hinzufügen eines Puffers, wie z.B. einem Cache in einem Prozessor, dafür gesorgt werden, dass die gewünschte durchschnittliche Vorhersagbarkeit erreicht wird. Deswegen ist in der Praxis der Entwicklungsaufwand für harte Systeme ein Vielfaches größer als für Weiche.
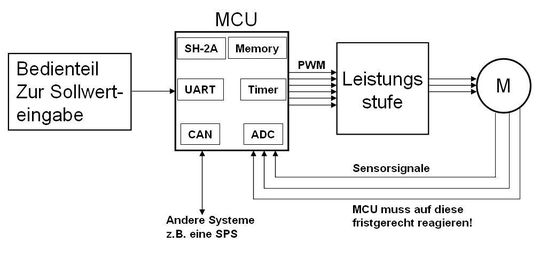
Ein gutes Beispiel für ein hartes Echtzeitsystem ist eine elektrische Motorregelung, also ein Frequenzumrichter (Bild 1). Das System stellt eine Regelschleife dar, in der kontinuierlich und im Takt der Motordrehungen Sensorsignale geliefert, verarbeitet und neue Pulsweitenmodulationseinstellungen ausgegeben werden müssen. Eine Verletzung des erforderlichen harten Echtzeitverhaltens wäre fatal und könnte zu großem Schaden führen, insbesondere wenn der Motor sicherheitsrelevante Systeme antreibt.
Echtzeitanforderungen für Mikrocontroller
Ein Mikrocontroller mit gutem Echtzeitverhalten hat also folgendes Profil:
- ein gutes Interrupt-System mit schneller, garantierter Reaktion und Priorisierung;
- eine schnelle CPU, insbesondere wenn die Berechnungen zwischen zwei Ereignissen aufwändig sind. Im Falle des Frequenzumrichters handelt es sich oft um komplexe Matrixoperationen, immer häufiger auch mit Gleitkommaarithmetik;
- geeignete Peripherie und Schnittstellen, die ebenfalls ein garantiertes Zeitverhalten bereitstellen. Beispiele sind Echtzeit-Ethernet, CAN, aber auch (wenn auch weniger beachtet) der Isochron- oder Interrupt-Modus von USB.
Viele SH-2A-MCUs sind speziell für Motorsteuerungen entwickelt und beinhalten daher ein aufwändiges Interrupt-System mit 15 Registerbänken, die binnen 30 ns reagieren. Das neueste Produkt ist der SH7216F, der eine Gleitkomma-Recheneinheit besitzt. Die Timer geben die notwendige PWM aus, sogar mit geregelter Totzeitkompensation, und zwei 12-Bit-A/D-Wandler messen die Phasenströme binnen einer Mikrosekunde. Neben zahlreichen seriellen Schnittstellen stehen auch Ethernet, CAN und USB zur Verfügung.
Schneller Speicher: MONOS-Flash
Schneller Speicher, ohne Wartezyklen, ist ebenfalls von großer Bedeutung für ein gutes hartes Echtzeitverhalten. Weiches Echtzeitverhalten kann oft damit leben, dass im Falle eines „Cache Miss“ erst Code nachgeladen werden muss, wie gesagt, schlimmstenfalls würde das Video kurz ruckeln. Harte Echtzeitsysteme profitieren aber sehr von Speicher, der schlicht schnell genug ist, Code und Daten immer sofort abzuliefern – der also deterministisch oder kausal ist, nach dem Grundsatz, dass das Anlegen einer bestimmten Adresse immer zur Ausgabe desselben Wortes innerhalb derselben Zeit führt. Ein solcher Speicher ist also geradezu mathematisch ideal und verursacht keinerlei nichtdeterministisches Verhalten im System.
(ID:357926)
:quality(80)/p7i.vogel.de/wcms/cd/32/cd3243e4a9a6476265ef6ea9463dfbd8/0129852659v2.jpeg "Die PIC64-Serie an Multicore-Mikroprozessoren setzt auf RISC-V-Kerne und eignen sich speziell für Anwendungen mit asynchronem Multipricessing (AMP) in intelligenten Embedded-Edge-Anwendungen. (Bild: Microchip)")
:quality(80)/p7i.vogel.de/wcms/50/77/5077deae16cda9941509bae740566558/0126809223v2.jpeg "Das Board aus der entsorgten E-Zigarette, das Ingenieur Bogdan Ionescu für seinen Webserver verwendete. Der Mikrocontroller ist ein PY32F002B MCU mit einem 24 MHz Arm Cortex M0+ Prozessorkern. (Bild: Bogdan Ionescu / bogdanthegeek.github.io)")