
:quality(80)/p7i.vogel.de/wcms/4e/86/4e867aaba2db945a9335b9cfbdc4638b/0132057394v4.jpeg "Apollo Guidance Computer: Der Computer, der die Mondmission steuerte, setzte einen Benchmark hinsichtlich Miniaturisierung und Zuverlässigkeit. (Bild: US National Air and Space Museum / Smithsonian / NASA)")
:quality(80)/p7i.vogel.de/wcms/ea/97/ea9733f0d2fb2f44c1d92fc6210f4503/0132037890v2.jpeg "IBM hat den nach eigenen Angaben ersten Testchip vorgestellt, der in einer (äquivalenten) Strukturgröße von 7 Angström gefertigt wurde. Das Unternehmen beschreitet mit dem Nanostack genannten 3D-Fertigungsansatz andere Wege als etwa Intel oder TSMC. (Bild: IBM)")
:quality(80)/p7i.vogel.de/wcms/c9/7d/c97d0bacc35f455e05a0a4e9e6b70b2d/0132013047v2.jpeg "Mit der Gigaquop-Klasse will Quera Quantencomputer anbieten, die 1.000-mal so viele Operationen ausführen können. (Bild: Quera)")
:quality(80)/p7i.vogel.de/wcms/86/2a/862afb1de8423bb7401098a2fd268281/0131792672v2.jpeg "Bild 1: Ein Spannungsversorgungskonzept für Lasten, welche eine vorgegebene Ein- und Abschaltreihenfolge (Sequencing) benötigen. (Bild: ADI)")
:quality(80)/p7i.vogel.de/wcms/75/cd/75cd68cb72cd593123547b08b0230de9/0132045388v2.jpeg "Haben Samsung, Sk Hynix und Micron ihre dominierende Stellung im Speichermarkt genutzt, um DRAM-Vorräte künstlich zu verknappen und damit stark ansteigende Preise zu rechtfertigen? In Kalifornien haben Verbraucher diesen Vorwurf erhoben und deswegen ein kartellrechtliches Verfahren per Sammelklage angestoßen. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/d6/81/d681b25217a05c3c26fc6c030e11b9e3/0132035853v2.jpeg "HBM4E-Speicherbausteine von Samsung: Samsung und SK Hynix sind die treibenden Kräfte hinter einer der größten Halbleiteroffensiven in Südkorea. Lokalen Medienmeldungen zufolge planen die beiden Speicherhersteller Investitionen von bis zu 2 Billiarden Won vor (umgerechnet rund 1,3 bis 1,4 Billionen US-Dollar oder 1,2 Billionen Euro). (Bild: Samsung)")
:quality(80)/p7i.vogel.de/wcms/64/b8/64b8198bed73fbd62c86a9a0aad8a414/0132008979v2.jpeg "OpenAI-CEO Sam Altman (links) und Broadcom-Chef Hock Tan (rechts) bei der gemeinsamen Vorstellung des gemeinsam entwickelten KI-Chips. (Bild: OpenAI)")
:quality(80)/p7i.vogel.de/wcms/67/b2/67b245336515275479705d500b1bc74f/0132006001v2.jpeg "Produktivitätsparadoxon: KI beschleunigt die Codeerstellung, doch Kontrolle, Nachverfolgbarkeit und Governance werden laut Gitlab's AI Accountability Report zum neuen Engpass im Software-Lieferprozess. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/4d/62/4d62c95f3916b63435550f76ade9c18f/0132034010v2.jpeg "Dezentrale Infrastruktur: In ländlichen Regionen mit schwankender Netzabdeckung müssen Füllstandssensoren an Industrie-Tanks besonders robust und gleichzeitig energiesparend funken. (Bild: Burger Engineering GmbH)")
:quality(80)/p7i.vogel.de/wcms/5b/6b/5b6b51da740a390c6404d33e5fad1c69/0131954057v1.jpeg "Auszug aus den vorhandenen Editor-Erweiterungen der Open VSX Registry: Der Schwerpunkt von Entwicklungsumgebungen verschiebt sich zunehmend von lokalen Tools hinaus in externe Infrastrukturen. Das hat jedoch spürbare Auswirkungen auf Entwicklungsprozesse selbst. (Bild: Open VSX Registry)")
:quality(80)/p7i.vogel.de/wcms/2d/d7/2dd7bbfc4efb3a470e7c5e8ef6fb2c1d/0132028394v2.jpeg "Schnittstelle zur Kreislaufwirtschaft: Über einen Scan erhalten Hersteller, Recycler und Behörden künftig Zugriff auf alle relevanten Daten des digitalen Batteriepasses. (Bild: frei lizenziert)")
:quality(80)/p7i.vogel.de/wcms/c4/14/c414e36acae0acbfc2f3daab2a6b43d7/0132022821v2.jpeg "Das HZB-Team betreibt am HZB ein Freiluftlabor, wo ganz verschiedene Solarzellen unter realen Bedingungen Monate oder Jahre lang Wind und Wetter ausgesetzt sind. (Bild: Silvia Steinbach)")
:quality(80)/p7i.vogel.de/wcms/06/a1/06a158e32b18d99fcea65547cec5d4c7/0132069489v2.jpeg "Mit direkter Integration von Speicher ins Chip-Package verspricht AMD mit dem Versal Premium Gen 2 SoC eine schnellere Datenübertragung, verringerte Latenz und einem potentiell geringere Stromverbrauch. (Bild: AMD)")
:quality(80)/p7i.vogel.de/wcms/14/d7/14d7cb77132e76f852e71edf06cc94fb/0131803730v2.jpeg "Tom Trill, CEO von Qualinx, und Dr. Manfred Horstmann, Senior Vice President und General Manager bei GlobalFoundries (Bild: Globalfoundries)")
:quality(80)/p7i.vogel.de/wcms/5b/75/5b758a6d983e2380da34de7bd474d422/0131438570v2.jpeg "AMD Zynq Ultrascale+ MPSoC ZCU102 Evaluierungskit: Ob als fertiges System oder zur Vorevaluierung, die Implementierung eines RISC-V-Softcores auf einem FPGA kann sich mituner schwieriger gestalten als gedacht. (Bild: AMD)")
:quality(80)/p7i.vogel.de/wcms/f1/5f/f15fac232d70cc5d3b3b889500ecd880/0132049099v2.jpeg "SMT: Die Entwicklung der SMT-Technik veränderte die Elektronikfertigung grundlegend, da keine bedrahteten Bauelemente verwendet werden. (Bild: © Nataliia - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/0f/c4/0fc4f1c68ab438a1b827685f52aac47b/0131898344v2.jpeg "Die Electronica 2026 zeigt Technologien für resiliente Elektronik. (Bild: Messe München GmbH)")
:quality(80)/p7i.vogel.de/wcms/e8/42/e842dfba0064a29978935733ebc89eb0/0131831278v2.jpeg "Während Desktop-Systeme heute standardmäßig mit Exploit-Mitigation-Mechanismen abgesichert sind, fehlen vergleichbare Schutzmaßnahmen in vielen Embedded Devices noch immer. Das macht vernetzte Geräte im Feld zu einem attraktiven Angriffsziel und verschärft den Handlungsdruck für Hersteller. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/3a/1c/3a1ca81929d80cf3b370c68f1856d76d/0132041787v2.jpeg "Prof. Dr. Markus Bender bei der Einweihung der neuen e-Line-Elektronenstrahl-Lithografie-Anlage. (Bild: Hochschule RheinMain)")
:quality(80)/p7i.vogel.de/wcms/75/5d/755d64e80b937bba9d60a04ec23fab91/0132007458v2.jpeg "Die AC/DC-Sonden CT6704 und CT6705 von Hioki sind in der Lage, auch bei längeren Messreihen eine stabile Nulllinie zu halten. (Bild: Hioki)")
:quality(80)/p7i.vogel.de/wcms/68/63/68634088aef62ad2c0d79834a39cf099/0131984998v2.jpeg "Für photonisch integrierte Schaltungen (PICs) arbeiten Advantest und Openlight zusammen, um eine hybride Testumgebung für elektrische und photonische Tests zu entwickeln. (Bild: frei lizenziert)")
:quality(80)/p7i.vogel.de/wcms/2c/05/2c05adc30b1bb9116c6bc4599cd718a7/0131969461v2.jpeg "Die bewährte Pilot V8 basiert nun auf der neuen, offenen OPERA-Plattformarchitektur von Seica. (Bild: Seica)")
:quality(80)/p7i.vogel.de/wcms/9f/38/9f38a19f3f7d7ea851b6b7ed9db2b9c5/0132044695v2.jpeg "Robotersysteme, die Bewegungsbefehle des Chirurgen hochpräzise, in Echtzeit und millimetergenau umsetzen und dabei auch feinstes Zittern herausfiltern können, sind bereits erfolgreich in Kliniken im Einsatz. Nun verspricht die Kombination dieser Technik mit Datenbrillen einen weiteren Innovationsschub. (Bild: Universitätsklinikum Leipzig I Lilly Schmidt)")
:quality(80)/p7i.vogel.de/wcms/68/05/680565ec117aa283bdd5d851d35c9b02/0132041131v2.jpeg "Theorie vs. Praxis: Warum ehrgeizige KI-Initiativen in der industriellen Realität oft an mangelnder Datenqualität und Praxistauglichkeit scheitern. (Bild: Gemini / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/37/06/3706624fcc6fce8bd86fe8405c656274/0131986045v2.jpeg "Symbolbild: Ein autonomer Mini-Roboter kartografiert die Umgebung. (Bild: KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/ee/69/ee6946ad51e7b3bc43fde641c2619fab/0132052556v2.jpeg "Göpel hat das Werkerassistenzssystem Multi Line Assist um Funktionen erweitert. (Bild: Göpel Electronic)")
:quality(80)/p7i.vogel.de/wcms/a4/51/a4511a6a3fe8ba911faa80019131db52/0132009230v3.jpeg "Electronic Manufacturing Services: Das bedeutet heutzutage höchste Kompetenz in der Elektronikproduktion zu zeigen – von der Leiterplattenbestückung mit Pick-and-Place- Automaten zum Setzen von kleinsten Bauteilen auf Platinen über Kabelkonfektionierung bis zum kompletten Systembau inklusive Hard- und Softwareentwicklung. Incap ist einer der größten europäischen Full-Service-Anbieter in Sachen Elektronik. (Bild: Incap)")
:quality(80)/p7i.vogel.de/wcms/5d/b8/5db877ee4751822398d04dc32053752e/0132042223v2.jpeg "Ausrichtung auf Physical AI: Mit der Übernahme von Synaptics will sich On Semiconductor an der Schnittstelle zwischen den Bereichen Leistungselektronik (Power), Sensorik, vernetztem Computing und Steuerung positionieren. (Bild: On Semiconductor)")
:quality(80)/p7i.vogel.de/wcms/4e/41/4e4159d1e93e67d47bd2f51a90691b23/0131548978v2.jpeg "Transformation im Engineering: KI-gestützte Systeme generieren zunehmend selbstständig Schaltschranklayouts und entlasten Konstrukteure von zeitraubenden Routineaufgaben. (Bild: WSCAD)")
:quality(80)/p7i.vogel.de/wcms/d6/ea/d6eac438c362c545cab42ef0f30bcfc0/0130136975v2.jpeg "Die Bewerbungsphase für den James Dyson Award 2026 ist gestartet. (Bild: Dyson)")
:quality(80)/p7i.vogel.de/wcms/e5/6c/e56ceb935ba09cb66a4fd0f961b2d3e9/0129642888v2.jpeg "(Bild: Vogel Professional Education)")
Anbieter zum Thema
:fill(fff,0)/p7i.vogel.de/companies/65/f1/65f186172d9f0/syslogic-logotype-alt-navy-mint.jpeg "syslogic-logotype-alt-navy-mint (Syslogic.ai)")
Rückblick in die SCSI-Zeit
Zum besseren Verständnis ein Rückblick in die alte SCSI-Zeit. So werden z.B. für die Abarbeitung eines SCSI-READ-Kommandos mehrere Busphasen durchlaufen: Command-Phase (zum Übertragen der Kommandobytes ans Gerät), Message-Phase (zum Festlegen der Art des Bustransfers), Data-Phase (zur Übertragung der Nutzdaten) und Status-Phase (zur Quittierung durch das Gerät), wobei das selektierte Gerät am SCSI-Bus diese Phasen treibt.
Abhängig von der Busphase, steuert ein Mikrocode auf dem HBA lediglich korrespondierende Datentransfers zwischen PU und Gerät, deren Inhalte vom SCSI-Treiber der PU vorgegeben werden. Der Mikrocode ist im RAM der PU gespeichert und wird vom HBA geladen. Während des Abarbeitens eines Kommandos können interrupt-gesteuert mehrfache Interaktionen zwischen HBA und PU erfolgen, um z.B. PU-seitig Datenpuffer nachzufüllen oder parallel das zweite Gerät anzusteuern (während das erste den SCSI-Bus freigegeben hat).
Der SCSI-Treiber der PU ist also stärker mit der SCSI-Busansteuerung verknüpft als man es vermuten würde. Eine der Herausforderungen auf dem neuen Flyer-Subboard besteht somit darin, der PU einen SCSI-Bus inklusive SCSI-Busphasen vorzuspiegeln, den es physikalisch im System nicht mehr gibt.
Detaillierte Analyse des alten SCSI-Treibers erforderlich
Um Aufwand und Komplexität der zu entwickelnden Software in Grenzen zu halten, musste der alte SCSI-Treiber detailliert analysiert werden. Es galt herauszufinden, welche der vielen Features des HBA in welcher Weise genutzt werden und mit welchen Abläufen die neue Software rechnen muss. Eine Realisierung der kompletten Funktionalität des HBA wäre sowohl an der fehlenden Kenntnis des exakten Verhaltens des HBA als auch an inakzeptablem Aufwand gescheitert.
Hierbei wird es paradoxerweise zum Vorteil, dass die Software der PU nicht geändert werden darf: Wäre es nämlich möglich, dass geänderte PU-Software im Glauben, den gleichen HBA vorzufinden, diesem einen geänderten Mikrocode zur Ausführung gäbe, dann müsste man den kompletten Befehlssatz des Mikrocodes für den HBA softwaremäßig emulieren. Da aber der Mikrocode unverändert bleiben muss, genügt es, nur die entsprechende Funktionalität abhängig von den jeweiligen Einsprungstellen des Mikrocodes zu realisieren.
Die neue Hardware-Software-Lösung spiegelt also PU-seitig SCSI-Busphasen vor, in Richtung der Massenspeichergeräte muss sie dagegen den Transfer von der SCSI-Welt in die SATA- und SD-Karten Welt leisten. Dies betrifft sowohl Befehle als auch Quittungen, Fehlerbehandlung und Diagnose. In diesem Fall ist die Wahl von Embedded Linux als Betriebssystem hilfreich.
SCSI-Subsystem des Linux-Kernels steuert das SATA-Festplattenlaufwerk
Linux verfügt über ein sehr ausgereiftes, dreischichtiges SCSI-Subsystem im Kernel. Die oberste Schicht dient als Schnittstelle (via open(), close(), read(), write(), usw.) zu den Applikationen für Gerätetypen wie Festplatte, Bandlaufwerk oder CDROM. Die unterste Schicht bilden die Treiber für die diversen HBAs. Die mittlere Schicht (SCSI Midlayer) leitet als Verbindungsschicht zwischen diesen beiden die Kommandos nach unten weiter, führt Fehler-, Timeout- und Abbruchbehandlungen durch, und übernimmt Geräteerkennungs- und Management-Funktionen.
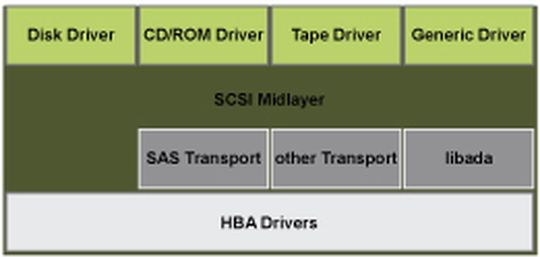
Das entscheidende Merkmal der mittleren Schicht ist, dass sie nicht nur SCSI-, sondern auch ATA-HBA-Treiber der unteren Schicht bedienen kann. Dies wird über ein spezielles Modul („libata“) realisiert, das SCSI-Befehle, Quittungen, usw. in entsprechende ATA- Instruktionen transformiert. Die Ansteuerung des neuen SATA Festplattenlaufwerks erfolgt somit über das SCSI-Subsystem des Kernels.
Die SD-Karte wird hingegen über das neuere MultiMediaCard Subsystem des Kernels angesteuert, der Host-Controller der SD-Karte ist Teil des FPGA.
(ID:282758)
:quality(80)/p7i.vogel.de/wcms/6a/b4/6ab425994d3a51adb386ff1f6ac057c4/90781066v2.jpeg "Einzelne Vorgänge innerhalb eines Embedded-Systems nachzuvollziehen oder zu analysieren kann sich als Herausforderung gestalten. Linux bietet nativ bereits eine Tracing-Infrakstruktur und hält eine Reihe von Tracing-Tools bereit, mit der sich Ereignisse gezielt steuern oder überprüfen lassen. (Bild: gemeinfrei)")
:quality(80)/p7i.vogel.de/wcms/2a/e3/2ae3035672dc4ccaae1086a81fe0df5b/0126146178v3.jpeg "MIPI I3C Interop Workshop in München (Bild: Angelika Güc)")