
:quality(80)/p7i.vogel.de/wcms/37/ec/37ece4c276f37114e8f40696ff5dcd66/0130537789v2.jpeg "Um die Entwicklung von High-TRL-Halbleiter-Qubits zu beschleunigen und damit in Europa produzierte Quantensysteme in größerem Maßstab zu ermöglichen wurde die vom belgischen Forschungsinstitut IMEC koordinierte Quanten-Pilotlinie SPINS ins Leben gerufen. (Bild: Imec)")
:quality(80)/p7i.vogel.de/wcms/46/7c/467c0afffbfd10c3553c2888a4a6289f/0130479810v3.jpeg "Spezielle Elektroden, die Forscher am Fraunhofer IFAM entwickeln, entfernen wertvolle Rohstoffe wie Lithium und Kobalt beim Recyceln von Batterien aus dem Prozesswasser. (Bild: Fraunhofer IFAM)")
:quality(80)/p7i.vogel.de/wcms/12/3d/123d9eb2c2e4ce13296371a2ad3718a4/0130412664v2.jpeg "In seiner PCIe-5.0-SSD „BM9K1“ setzt Samsung erstmals statt ARM auf RISC-V-Kerne für den Festplattencontroller. (Bild: Samsung / finance.biggo.jp)")
:quality(80)/p7i.vogel.de/wcms/b6/e7/b6e755d9e704319c0bb59dc1ac2d67e8/0130537290v2.jpeg "Menschliches Wissen, künstliche Intelligenz: Intelligente Datenverarbeitung direkt am Einsatzort verlangt nach dem Zusammenspiel von KI, Hardware-Know-how und konkreter Anwendungserfahrung. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/8b/10/8b10d1edceb749de99c1df3ad97be01e/0130564619v2.jpeg "Infrastruktur für KI-Agenten: Intel und Sambanova teilen Rechenlast auf drei Prozessortypen auf (Bild: Gemini / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/ac/da/acda3bafe46d3bf8e104a2a7bc2ac557/0130535476v2.jpeg "Geschätzter Ansprechpartner für Journalisten: Alfred Eiblmayr koordiniert seit vielen Jahren beim Halbleiterhersteller STMicroelectronics die Presse- und Öffentlichkeitsarbeit. Als ehemaliger Redakteur weiß er, worauf es ankommt. (Bild: Alfred Eiblmayr)")
:quality(80)/p7i.vogel.de/wcms/ca/9b/ca9b681785123f9700518a46897f9779/0130428786v1.jpeg "Biometrische Systeme mit künstlicher Intelligenz sind darauf ausgelegt, Personen anhand ihrer physischen oder verhaltensbezogenen Merkmale zu erkennen. (Bild: © AlinStock - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/38/cb/38cbe19e814dd30b94780bc3946547ab/0130446533v2.jpeg "Zur Absicherung seines KI-Ökosystems geht Nvidia eine Strategische Partnerschaft mit Marvell ein und investiert hierfür 2 Mrd. US-$ in den ASIC-Spezialisten. Im Fokus stehen NVLink Fusion, optische Interconnects und Silicium Photonics. (Bild: Marvell)")
:quality(80)/p7i.vogel.de/wcms/c2/88/c28805ea7b2261235475146a5b0c61f8/0130313028v2.jpeg "x86 trifft adaptive Logik: Auf der Messe demonstriert AMD die industrielle Vernetzung eines Node-RED-Gateways (links) mit Zynq-UltraScale+-Controllern (Mitte) und einer Soft-SPS auf Basis der Ryzen AI P100 Serie (rechts). (Bild: Manuel Christa)")
:quality(80)/p7i.vogel.de/wcms/fa/8d/fa8dedee195f29c33c89d86311c258ee/0130104146v2.jpeg "Kompakte KI-Power: Die Smart-Module SIM8668 und SIM8666 von Simcom vereinen auf kleinstem Raum eine Quad-Core-CPU samt integrierter NPU für ressourcenschonende Industrie- und Robotikanwendungen. (Bild: Chip: Simcom/Hintergrund: KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/69/7a/697a270ed7538378d1fbc0f0b240ed25/0130534691v3.jpeg "Die Wago Stromversorgung Pro 2 ist eine intelligente und zuverlässige Stromversorgung mit integrierter Redundanz und MOSFET-Technologie und gewährleisten dadurch eine höhere Zuverlässigkeit der Anwendung. (Bild: WAGO GmbH & Co. KG)")
:quality(80)/p7i.vogel.de/wcms/e7/a4/e7a4e048491e60cb30e22a860f5d68bc/0130519425v4.jpeg "Dynamisch:
Die Zuverlässigkeit der Stromversorgung hängt von mechanischen und thermischen Faktoren sowie zeitlichen Abfolgen ab. (Bild: inpotron Schaltnetzteile GmbH)")
:quality(80)/p7i.vogel.de/wcms/1b/f0/1bf02d41e3eac721823841a4c1228753/0130519149v2.jpeg "Der Wandler GQA2W024A050V-007-R ist in mehreren Gehäusekonfigurationen erhältlich, um Entwicklern maximale Flexibilität für ihr Gesamtgehäusedesign und die Kühlung des Wandlers zu bieten. (Bild: TDK-Lambda)")
:quality(80)/p7i.vogel.de/wcms/1a/53/1a539631c940d184689460600bd2b395/0130410666v2.jpeg "Das iG-G74M von iWave Global ist das erste erhältliche System-on-Module, das den neuen FPGA-Modulstandard oHFM.c der SGeT erfüllt. (Bild: iWave Global)")
:quality(80)/p7i.vogel.de/wcms/10/45/1045969e69a1db4aaa73d0f74f55cc02/0129962687v2.jpeg "Bosch Rexroth und AMD arbeiten gemeinsam an Software-Defined Automation: ctrlX OS unterstützt nun auch auf AMD Embedded x86-CPUs und adaptive SoCs und verspricht so noch größere Hardware-DesignFlexibilität, nahtlose Skalierbarkeit und eine sichere, modulare Betriebssystem-Grundlage. (Bild: Bosch Rexroth AG)")
:quality(80)/p7i.vogel.de/wcms/cd/32/cd3243e4a9a6476265ef6ea9463dfbd8/0129852659v2.jpeg "Die PIC64-Serie an Multicore-Mikroprozessoren setzt auf RISC-V-Kerne und eignen sich speziell für Anwendungen mit asynchronem Multipricessing (AMP) in intelligenten Embedded-Edge-Anwendungen. (Bild: Microchip)")
:quality(80)/p7i.vogel.de/wcms/ba/e4/bae4e54395e5a53088060531ef99b814/0130359274v2.jpeg "Mit dem Fuse EDA AI Agent verfolgt Siemens EDA ein umfassendes Programm, alle Aspekte des Chipdesigns mit KI-Coworkern zu erleichtern, auch in Questa One. (Bild: Siemens EDA)")
:quality(80)/p7i.vogel.de/wcms/35/af/35af7dd326d198475d06fbb69aa600b5/0130175971v2.jpeg "Diff GT kann in einer kostenlosen Probeversion ausprobiert werden. (Bild: CSci)")
:quality(80)/p7i.vogel.de/wcms/c0/2e/c02e7bf72bfc434888c37100e2511681/0130127767v3.jpeg "„Wegen seiner kompakten Bauweise, des modularen Aufbaus und der hohen Effizienz ist der Axialflussmotor eine attraktive Alternative zur etablierten Radialflussmotor-Topologie“, PEM-Leiter Professor Achim Kampker (Bild: RWTH Aachen University)")
:quality(80)/p7i.vogel.de/wcms/e1/0b/e10bc04827e33786548587e32bbae422/0130438700v2.jpeg "Optische Datenkommunikation: Um Bauteile auf Basis optischer Datenkommunikation umfassend testen zu können, sind neue Testfähigkeiten erforderlich. (Bild: © kudzik - stock.adobe.com / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/35/06/3506f2a8d33a696aaef12a30771bd8d8/0130496747v2.jpeg "Ein von Keysight entwickelter Empfänger-Test für 10BASE-T1S fördert den Test von funktionskritischen Empfängern, um die Zuverlässigkeit und Sicherheit künftiger Bordnetzwerke zu gewährleisten. (Bild: Keysight)")
:quality(80)/p7i.vogel.de/wcms/e5/ed/e5ed08c670c44565a9130e95a760dddc/0130494578v2.jpeg "PV-Anlage auf dem Dach der Elbfabrik, einer Forschungsfabrik des Fraunhofer IFF. Mit einem Sensorsystem lassen sich Fehler in PV-Großanlagen frühzeitig erkennen. (Bild: Fraunhofer IFF/Anne Bornkessel)")
:quality(80)/p7i.vogel.de/wcms/ce/33/ce336bc438b912829effe8d4704dc159/0130480307v2.jpeg "Die VNA-Plattform von Siglent unterstützen vollständige Zweitor-S-Parameter-Messungen von 9 kHz bis 3 GHz. (Bild: Siglent)")
:quality(80)/p7i.vogel.de/wcms/3a/72/3a722ed2ad6ac4894c352e6ce87b6560/0130567207v2.jpeg "Mit Seamless Automation macht Festo die Automatisierungstechnik so einfach, dass Technik ein Erlebnis wird. Das Konzept baut Komplexität ab und schafft Klarheit für intuitive Lösungen – zu erleben auf dem Festo Stand in Halle 13 auf der Hannover Messe 2026. (Bild: Festo)")
:quality(80)/p7i.vogel.de/wcms/e4/d1/e4d122a8ecce14b98c8298c1cc130194/0130561462v2.jpeg "(Bild: Spectra AG)")
:quality(80)/p7i.vogel.de/wcms/3c/55/3c5505dd3ca3971cddd09c583a4c907d/0130458429v2.jpeg "Fit für Extrembedingungen: Diese Illustration zeigt einen photonischen Chip, dessen Komponenten mit der neuen Verbindungstechnik hochstabil gebondet wurden. (Bild: NIST)")
:quality(80)/p7i.vogel.de/wcms/47/ce/47ce64bad7990f276f68cbb24505f6dd/0130472850v2.jpeg "Data Modul fokussiert sich auf die Integration kompletter Display-Systeme. (Bild: Data Modul)")
:quality(80)/p7i.vogel.de/wcms/2e/95/2e9597b5dc1873771c7fe9c32ac41e82/0130549010v2.jpeg "Deepsleep: 13 Stunden lang war Deepseek nicht verfügbar. Nutzer spürten die Auswirkungen teils deutlich. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/15/56/15564dea31861c376a385658c3b961a3/0130465243v2.jpeg "Luftaufnahme von Intels Fab 34 in Leixlip, Irland, aus dem Jahr 2024. In dem Werk werden Chips nach den hauseigenen Verfahren Intel 3 und Intel 4 gefertigt. (Bild: Intel)")
:quality(80)/p7i.vogel.de/wcms/bf/2a/bf2aad428ab1a80e6738fdbdc2efeb7e/0130453420v2.jpeg "Unter Dach und Fach: Nach Freigabe aller zuständigen Behörden das das amerikanische Unternehmen Molex den britischen Verbindungstechnik-Anbieter Smiths Interconect übernommen. (Bild: Molex / Smiths Interconect)")
:quality(80)/p7i.vogel.de/wcms/d6/ea/d6eac438c362c545cab42ef0f30bcfc0/0130136975v2.jpeg "Die Bewerbungsphase für den James Dyson Award 2026 ist gestartet. (Bild: Dyson)")
:quality(80)/p7i.vogel.de/wcms/e5/6c/e56ceb935ba09cb66a4fd0f961b2d3e9/0129642888v2.jpeg "(Bild: Vogel Professional Education)")
:quality(80)/p7i.vogel.de/wcms/69/1f/691f39ba12be3cad90eb88bdabc456a6/0127321404v2.jpeg "Das Kreativteam Christian Göller, GreatScott! und Christopher Becht (v. l. n. r.): erfolgreiches Creator-Marketing im B2B-Sektor (Bild: Würth Elektronik)")
Digitale Signalverarbeitung in Multimedia-Anwendungen DSP-optimierte FPGAs und dedizierte Universal-DSPs im Vergleich
Die allgemeine Verwendung von Video und Standbildern sowie die wachsende Nachfrage nach rekonfigurierbaren Systemen wie Software Defined Radio treiben die Verbreitung von DSP-Applikationen voran. Wie erhält man dabei das beste Preis-/Leistungsverhältnis? Anhand herkömmlicher Universal-DSPs oder durch die Implementierung von DSP-Funktionen in programmierbare Logikbausteine?
Anbieter zum Thema
Bei vielen Mulitmedia-Applikationen verbindet sich der Bedarf an intensiver Digitalsignalverarbeitung mit Kostensensitivität. Das führt zur Nachfrage nach leistungsfähigen und dabei doch niedrigpreisigen DSP-Lösungen. In den beiden gebräuchlichsten Ansätzen zur Implementation von DSP-Funktionen kommen DSP-Universalchips bzw. FPGAs zum Einsatz. Jeder Ansatz hat seine Vorteile, und die optimale Methode hängt von den Anforderungen an die Applikation ab.
Viele DSP-Funktionen wer-den kundenspezifisch implementiert, doch einige Funktionen wie nichtrekursive Filter (Finite Impulse Response – FIR), rekursive Filter (Infinite Impulse Response – IIR), schnelle Fouriertransformationen (FFT) und Mischglieder sind vielen Applikationen gemeinsam. Alle erfordern eine Verbindung aus Multiplizierelementen mit Addition, Subtraktion und Akkumulation.
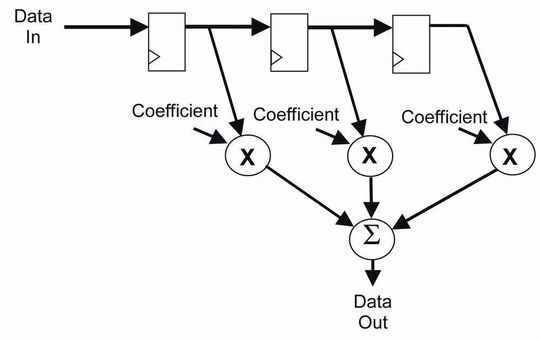
Das nichtrekursive Filter (Bild 1) speichert eine Serie von n Datenelementen, von denen jedes mit einem zusätzlichen Zyklus verzögert wird. Jedes Datenelement wird mit einem Koeffizienten multipliziert. Die aufsummierten Resultate ergeben den Output. Einige Implementierungen führen alle Multiplikationen parallel aus. Allgemeiner ausgedrückt, wird die Implementierung in N Stufen aufgeteilt, wobei ein Akkumulator die Teilergebnisse von einer Stufe zur nächsten weitergibt. Diese handelt Geschwindigkeit gegen funktionale Ressourcen ein: Es gibt N Berechnungsstufen, die aber nur n/N Multiplika-toren benötigen. Abhängig vom Aufbau der Koeffizientenwerte und davon, ob die Koeffizienten statisch oder dynamisch sind, sind allgemein etliche weitere Designoptimierungen üblich.
Schnelle FFTs
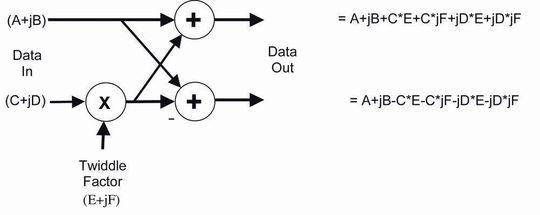
Für viele Applikationen – von der Bildkomprimierung bis zur Bestimmung des Spektralgehalts einer Datenabtastung – werden schnelle FFTs verwendet. Dafür gibt es mehrere Methoden: Üblich ist die Cooley-Tukey-Dezimation, bei der die FFT in mehrere kleinere FFTs aufgeteilt wird. In der einfachsten Implementierung wird ein als Radix-2-Schmetterling bezeichnetes Element benutzt, das von den Input-Daten mehrere Mal durchlaufen werden muss (Bild 2). Laut der linken Seite des Diagramms ist die Berechnung einfach. Da alle Multiplikationen und Additionen jedoch mit komplexen Zahlen erfolgen, stellt die tatsächlich erforderliche Anzahl von Multiplikationen und Additionen doch eine größere Herausforderung dar, wie die rechte Seite des Diagramms zeigt.
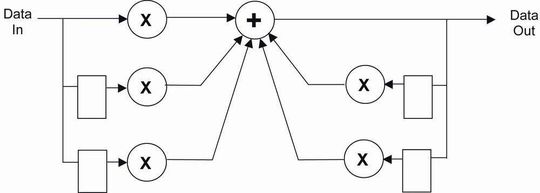
Das rekursive Filter (IIR) ist dem FIR-Filter ähnlich, außer dass Feedback-Pfade hinzukommen. Design und Analyse von IIR-Filtern werden damit komplexer als bei FIR-Filtern. Andererseits kann der IIR-Ansatz auf gleicher Chipfläche zu einem leistungsfähigeren Filter führen. Zwar gibt es verschiedene IIR-Architekturen, doch ein gemeinsamer Ansatz besteht darin, IIR-Filter aus Bi-Quads zweiter Ordnung aufzubauen (Bild 3).
(ID:207530)
:quality(80)/p7i.vogel.de/wcms/de/48/de48603453b0bd091cef84dbbefe37c1/0126851659v2.jpeg "Eine neuartige FPGA-Architektur ermöglicht die kostengünstige Umsetzung von besonders linearen und stromsparenden Zeit-zu-Digital-(TDC-)Wandlern. (Bild: frei lizenziert)")
:quality(80)/p7i.vogel.de/wcms/16/f5/16f53e7661525c7f1c4db7a75de9cec1/0130519539v2.jpeg "J-K-Flipflop: Funktionsprinzip eines vierstufigen Schieberegisters. (Bild: Texas lnstruments, Tom Burgess)")