:quality(80)/p7i.vogel.de/wcms/e9/ce/e9ce137e87eccac328ec5504c586c477/0129711019v3.jpeg "Im Rahmen eines Entwicklungsprojekts wurden verschiedene bleireduzierte und bleifreie Kupfer-Beryllium-basierte Legierungskonzepte untersucht, die die Anforderungen an hohe Festigkeiten als auch eine hohe elektrische Leitfähigkeit erfüllen. (Bild: Materion)")
:quality(80)/p7i.vogel.de/wcms/68/46/684697b6eb687384e0d8c6803450401a/0130056395v2.jpeg "Das TUM RoboGym (powered by Neura) in der Planungsphase (Grafik). Die TU München und das Robotik Startup Neura Robotics planen, gemeinsam am Campus der TU München das weltgrößte Robotik-Trainingszentrum einzurichten. (Bild: Neura Robotics)")
:quality(80)/p7i.vogel.de/wcms/0f/c0/0fc0d93c99a5d9066e58c39f41fb1b10/0130046764v2.jpeg "Sicherheit im Schienenverkehr: Dank 5G-Funkverbindung wird eine stabile Übertragung unter schwankenden Netzbedingungen garantiert. (Bild: Smart Rail Connectivity Campus (SRCC))")
:quality(80)/p7i.vogel.de/wcms/57/97/5797ffe4c6e19cf02aa75a7f742598b3/0130160607v2.jpeg "Johann Wiesböck: Der technische Fortschritt wird nie enden. Jedenfalls nicht in der Elektronik und ihren Anwendungen. (Bild: VCG)")
:quality(80)/p7i.vogel.de/wcms/1d/d8/1dd8627e2323721d4ee5436f9401911e/0130147601v2.jpeg "Der kompakte Modulator ermöglicht eine schnelle und energieeffiziente Datenübertragung und lässt sich kostengünstig herstellen. (Bild: Hugo Larocque, EPFL)")
:quality(80)/p7i.vogel.de/wcms/8e/d4/8ed4a2aa0bf362584aa1284f0adb2fdf/0130156040v2.jpeg "Kioxia-Werk in Kitakami: Auch der japanische Speicherspezialist hat nun in einer Notiz an Investoren darauf hingeweisen, aus dem Legacy-Geschäft mit Multi-Layer-Cell-Speichern aussteigen zu wollen. Die letzten Lieferungen an Bestandskunden sollen im März 2027 erfolgen. (Bild: Kioxia)")
:quality(80)/p7i.vogel.de/wcms/fb/d3/fbd33264fcdf128866667be0a0a6b657/0130137877v2.jpeg "Openclaw begeistert KI-Communitys. (Bild: Openclaw.ai)")
:quality(80)/p7i.vogel.de/wcms/a5/5e/a55ec741a9c17cb890b2cb5bcb919477/0130162776v2.jpeg "Von der vernetzten Kamera über den Saugroboter und den Industrieroboter bis hin zu Drohne und Humanoiden wandert KI entlang der Entwicklung von „Basic Intelligence“ zur „Multi-Purpose Intelligence“ immer näher an Sensoren und Aktoren, während softwaredefinierte Architekturen langfristige Systeme flexibel für neue Funktionen und KI-Modelle aufrüstbar machen. (Bild: Globalfoundries)")
:quality(80)/p7i.vogel.de/wcms/fa/8d/fa8dedee195f29c33c89d86311c258ee/0130104146v2.jpeg "Kompakte KI-Power: Die Smart-Module SIM8668 und SIM8666 von Simcom vereinen auf kleinstem Raum eine Quad-Core-CPU samt integrierter NPU für ressourcenschonende Industrie- und Robotikanwendungen. (Bild: Chip: Simcom/Hintergrund: KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/cc/13/cc1378375499a26b5ddbb309d2155acb/0130085649v2.jpeg "Vom Hardware-Produzenten zum Software-Anbieter: Neocortec lizenziert seinen NeoMesh-Protokoll-Stack zunehmend direkt an OEMs und Dritthersteller, anstatt ausschließlich auf den Verkauf eigener Funkmodule zu setzen. (Bild: mc/VCG)")
:quality(80)/p7i.vogel.de/wcms/24/58/2458f1cae3100e375fbb8124f02c54af/0130111244v3.jpeg "Stromsparer für das IoT: Der Npzero-Baustein übernimmt die Sensorüberwachung und schickt den Hauptprozessor in den Tiefschlaf. (Bild: Manuel Christa)")
:quality(80)/p7i.vogel.de/wcms/65/f4/65f404dc6d19d4f1628ad7e49f6a22cf/0130136276v2.jpeg "Bild 1: Blockschaltbild eines E-Bike-Systems auf Basis des Gate-Treibers DRV8363-Q1. (Bild: TI)")
:quality(80)/p7i.vogel.de/wcms/fa/fc/fafc300481de3fd4d7f34400327d0d01/0130127049v2.jpeg "Lenovo hat in Zusammenarbeit mit der Shanghai Jiao Tong University eine Silizium-Anoden-Batterie unter dem Namen „ED1000\" als Proof of Concept für mobile Workstations vorgestellt. (Bild: Lenovo)")
:quality(80)/p7i.vogel.de/wcms/d2/cd/d2cd33084ab732ff8a600bc55ade1f47/0130096831v1.jpeg "Die WE-MPSB-Familie. (Bild: Würth Elektronik eiSos)")
:quality(80)/p7i.vogel.de/wcms/10/45/1045969e69a1db4aaa73d0f74f55cc02/0129962687v2.jpeg "Bosch Rexroth und AMD arbeiten gemeinsam an Software-Defined Automation: ctrlX OS unterstützt nun auch auf AMD Embedded x86-CPUs und adaptive SoCs und verspricht so noch größere Hardware-DesignFlexibilität, nahtlose Skalierbarkeit und eine sichere, modulare Betriebssystem-Grundlage. (Bild: Bosch Rexroth AG)")
:quality(80)/p7i.vogel.de/wcms/cd/32/cd3243e4a9a6476265ef6ea9463dfbd8/0129852659v2.jpeg "Die PIC64-Serie an Multicore-Mikroprozessoren setzt auf RISC-V-Kerne und eignen sich speziell für Anwendungen mit asynchronem Multipricessing (AMP) in intelligenten Embedded-Edge-Anwendungen. (Bild: Microchip)")
:quality(80)/p7i.vogel.de/wcms/c7/f6/c7f61d0437c7f8fca3c6ff947ba2ad62/0129322490v2.jpeg "AMD hat die zweite Generation der Kintex UltraScale+ Gen 2 FPGA-Familie vorgestellt, die mit PCIe Gen4 den 4K-AV-over-IP-Betrieb für 4K/8K-Medienanwendungen unterstützt. (Bild: AMD)")
:quality(80)/p7i.vogel.de/wcms/66/0c/660c31afa35398bac9be42f2be73fdc4/0129073529v2.jpeg "FPGAs lösen Performance-Engpässe, gelten aber in der Programmierung als schwer zugänglich. Die universelle Programmiersprache Livt soll die Hürde senken – korrekt, deterministisch und HDL-kompatibel. (Bild: Toby Giessen / VCG)")
:quality(80)/p7i.vogel.de/wcms/35/af/35af7dd326d198475d06fbb69aa600b5/0130175971v2.jpeg "Diff GT kann in einer kostenlosen Probeversion ausprobiert werden. (Bild: CSci)")
:quality(80)/p7i.vogel.de/wcms/c0/2e/c02e7bf72bfc434888c37100e2511681/0130127767v3.jpeg "„Wegen seiner kompakten Bauweise, des modularen Aufbaus und der hohen Effizienz ist der Axialflussmotor eine attraktive Alternative zur etablierten Radialflussmotor-Topologie“, PEM-Leiter Professor Achim Kampker (Bild: RWTH Aachen University)")
:quality(80)/p7i.vogel.de/wcms/95/a1/95a197490145b7afcfd4dc176a1b5ef9/0130096114v2.jpeg "Der Einsatz amorpher Stähle im Stator ermöglicht eine deutliche Reduktion von Verlusten und steigert die Effizienz moderner Elektromotoren im Fahrzeugantrieb. (Bild: Horse Powertrain)")
:quality(80)/p7i.vogel.de/wcms/ef/a0/efa0d8af7bcf1d64636b877a04b853d9/0130136738v2.jpeg "Nigel unterstützt Ingenieure und Entwickler bei ihrer täglichen Arbeit. (Bild: Emerson NI)")
:quality(80)/p7i.vogel.de/wcms/bf/82/bf82f81061b759c454e15ec4c2e7560b/0130110139v2.jpeg "48 Volt im Fahrzeug: Ziel ist eine effiziente Energienutzung, einfache Integration sowie eine zuverlässige Leistung. Doch mit den Möglichkeiten kommen auch Probleme. (Bild: Leoni)")
:quality(80)/p7i.vogel.de/wcms/74/96/74964a7715c738a9e8b17681445ceed3/0130103633v2.jpeg "Zusammen mit dem Vektor-Netzwerkanalysator PNA/PNA-X kann der Lightwave Component Analyzer N4378A von Keysight optische Transceiver-Komponenten mit 1,6 T und darüber hinaus charakterisieren. (Bild: Keysight)")
:quality(80)/p7i.vogel.de/wcms/0d/18/0d183ecb569b03285578762658d2def6/0130061201v2.jpeg "Rahman Jamal war 30 Jahre bei National Instruments und damit ein Teil der Messtechnik-Branche. Den VIP-Anwenderkongress hat er mit aus der Taufe gehoben. (Bild: ELEKTRONIKPRAXIS/privat)")
:quality(80)/p7i.vogel.de/wcms/6a/93/6a93991941467231d8798c8577882dfd/0130071573v2.jpeg "(Bild: Vision & Control GmbH)")
:quality(80)/p7i.vogel.de/wcms/d3/76/d3760874d137b2f4bae5954b46dd5900/0130101582v3.jpeg "Hardware hautnah: Ein Development-Board mit dem neuen SoC nRF54LM20, der dank integrierter NPU speziell für extrem stromsparende Edge-KI-Anwendungen entwickelt wurde. (Bild: mc/VCG)")
:quality(80)/p7i.vogel.de/wcms/d1/d1/d1d103805ed7ac0df7feda4c46522b8c/0130164847v2.jpeg "Während das Mikrospritzgießen bei kritischen Bauteilen 10 bis 12 Wochen dauert, bietet der 3D-Druck eine schnellere Fertigung und größere Flexibilität bei Designiterationen, so Collins. (Bild: Boston Micro Fabrication)")
:quality(80)/p7i.vogel.de/wcms/42/de/42de87134adee379a83e5d633ba48c95/0130176499v2.jpeg "Zur LOPEC 2026 kamen nahezu 160 Aussteller und 2.400 Teilnehmer nach München, um sich über gedruckte Elektronik zu informieren. (Bild: Messe München GmbH)")
:quality(80)/p7i.vogel.de/wcms/90/0c/900ca1b73852ed45bd7e42a6119192dd/0130174841v2.jpeg "Simulation kann dabei helfen, Materialflüsse in der Produktion zu optimieren. (Bild: frei lizenziert)")
:quality(80)/p7i.vogel.de/wcms/bb/2a/bb2ac8404ae7b3f08a5c01d1ca0615a7/0130182922v2.jpeg "Steht ein Verkauf von Elmos im Raum? Medienberichten zufolge planen die Gründer des Unternehmens, die weiterhin mehrheitlich Anteile am Dortmunder Automotive-Spezialisten halten, den Ausstieg aus dem Chipunternehmen. (Bild: Elmos)")
:quality(80)/p7i.vogel.de/wcms/ef/9d/ef9dc7f8402f3f4ff42268e573921bc4/0130129635v2.jpeg "Mit Verträgen über bis zu fünf Jahre möchte Samsung-Co-CEO Jun Young-hyun auf den KI-getriebenen Nachfrageboom im Speichermarkt reagieren. Das soll für mehr Planungssicherheit im traditionell volatilen Speichergeschäft sorgen. Gleichzeitig dürfte dies aber für Kunden den Druck erhöhen, Bedarfe, Preise und Lieferketten langfristig präzise abzusichern. (Bild: Samsung)")
:quality(80)/p7i.vogel.de/wcms/d6/ea/d6eac438c362c545cab42ef0f30bcfc0/0130136975v2.jpeg "Die Bewerbungsphase für den James Dyson Award 2026 ist gestartet. (Bild: Dyson)")
:quality(80)/p7i.vogel.de/wcms/e5/6c/e56ceb935ba09cb66a4fd0f961b2d3e9/0129642888v2.jpeg "(Bild: Vogel Professional Education)")
:quality(80)/p7i.vogel.de/wcms/69/1f/691f39ba12be3cad90eb88bdabc456a6/0127321404v2.jpeg "Das Kreativteam Christian Göller, GreatScott! und Christopher Becht (v. l. n. r.): erfolgreiches Creator-Marketing im B2B-Sektor (Bild: Würth Elektronik)")
Weg- und Abstandssensoren Drei verschleißfrei arbeitende Sensorsysteme zur linearen Wegerfassung
Den besten Sensor gibt es nicht, wohl aber eine sorgfältig ausgewählte Sensorlösung mit der bestmöglichen Technik. Dazu ist das Angebot der Sensorhersteller reichhaltig. Welche Kriterien bei der Auswahl von Sensoren eine wichtige oder gar die entscheidende Rolle spielen, hängt ganz von der geplanten Aufgabe ab. Dieser Beitrag stellt drei Systeme zur linearen Wegerfassung vor.
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/93300/93330/65.jpg "EBV_Vekt4c_Subline_3d.jpg ()")
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/9600/9682/65.jpg "cbm_v_color.JPG ()")
Die Sensorik entscheidet in hohem Maße über das Gelingen einer Automation. Das gilt sowohl in der Fabrik- als auch in der Prozessautomatisierung. Darum sind Neu- und Weiterentwicklungen nirgendwo sonst so zahlreich wie in dieser Branche. Das hat dazu beigetragen, dass Maschinen schneller, zuverlässiger, flexibler und gleichzeitig auch sicherer geworden sind.
Müssen Positionen gemessen, geregelt oder Schaltpunkte flexibel gesetzt werden, sind absolut messende Wegerfassungssysteme der richtige Lösungsansatz. Dabei zeigt der Trend eindeutig in Richtung berührungslose Messung und damit hin zu verschleißfrei arbeitenden Sensoren mit analoger Schnittstelle. Nachfolgendend werden drei Systeme zur linearen Wegerfassung anhand von Lösungen an Beispiel des Sensorspezialisten Balluff beschrieben.
Sensorsystem 1: Induktive analoge Abstandssensoren
Induktive analoge Abstandssensoren der Bauform BAW gehören zur großen Familie der induktiven Näherungsschalter. Sie vereinen alle Vorteile aller moderner Wirbelstromsensoren. Sie erfassen berührungslos und damit verschleißfrei den Abstand zu einem beliebigen Metallobjekt über einen großen linearen Arbeitsbereich. Dabei sind sie auch noch sehr zuverlässig, robust und verschmutzungsunempfindlich.
Funktionsprinzip induktiver analoger Abstandssensoren
Das Sensorprinzip induktiver Näherungsschalter beruht auf der Wechselwirkung metallischer Leiter mit einem elektromagnetischen Wechselfeld. Aufgebaut ist das Sensorelement eines induktiven Sensors aus einer Spule und einem Ferritkern. Ein LC-Oszillator erzeugt ein hochfrequentes elektromagnetisches Wechselfeld. Dieses wird durch den Ferritkern gebündelt und tritt an der aktiven Fläche des Sensors aus. Gelangt nun ein metallisches Objekt, ein so genanntes Target, in das aktive Feld, werden dort Wirbelströme induziert, die dem LC-Schwingkreis Energie entziehen. Diese Änderung der Schwingungsamplitude wird im Sensor ausgewertet.
Das Spektrum der Anwendungen wächst stetig
Auch wenn analoge induktive Abstandssensoren ursprünglich für die frontale Erfassung eines Objektes entlang der Spulensymmetrieachse ausgelegt wurden, lässt sich mit ihnen genauso die radiale Bewegung eines Objektes entlang der Sensorfläche beobachten. Die Erfahrung zeigt, dass das Spektrum der möglichen Anwendungen ständig wächst. Die indirekte Dickenmessung von Papier, die Detektion von Spalten und Nuten in ebenen Metallflächen oder die Rundlaufprüfung rotierender Objekte sind nur einige wenige Beispiele für die vielseitige Verwendbarkeit dieses Sensortyps.
In der Regel kann der Anwender zwischen Ausführungen mit einem Spannungsausgang mit 0 bis 10 V oder einem Stromausgang von 0 bis 20 mA bzw. 4 bis 20 mA wählen. Zur Verfügung stehen Sensoren mit Arbeitsbereichen bis 50 mm, bei denen der Linearitätsfehler lediglich ± 3 % der oberen Messbereichsgrenze beträgt. Die Wiederholgenauigkeit liegt hier typisch zwischen ± 5 µm und ± 15 µm.
Arbeitsbereiche und Wiederholgenauigkeiten
Ausgewertet wird das Sensor-Ausgangsignal direkt von der elektronischen Steuerung, wobei die benötigten Schaltpunkte nicht manuell justiert werden müssen, sondern frei programmierbar sind. So kann der Anwender nicht nur Ventilstellungen lückenlos überwachen, sondern auch die hydraulische Endlagendämpfung durch eine elektronische ersetzen. Es lassen sich beispielsweise Prozesse mit wechselnden Massen wesentlich feiner regeln. Zugute kommt dies der Lebensdauer der einzelnen Komponenten, denn Stoß- und Schwingungsbelastungen für Geräte und Anlagen werden effektiv auf ein Minimum reduziert.
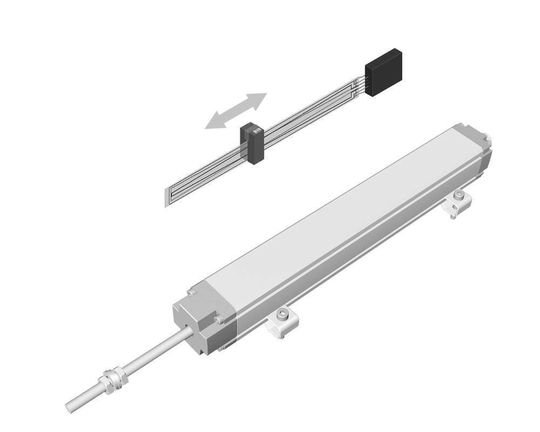
Sensorsystem 2: magnetoinduktive Wegsensoren
Magnetoinduktive Wegsensoren des Typs BIL liefern absolute, kontinuierliche und wegproportionale Ausgangssignale. Die Standardausführung des patentierten Sensortyps ist mit einem Gehäusequerschnitt von 15 mm und zwei Ausführungen mit 95 bzw. 230 mm Länge eine verschleißfreie Alternative im Messbereich von 60 bzw. 160 mm. Aufgrund ihrer geringen Abmessungen kann man sie problemlos in Applikationen integrieren. Weil zwischen Sensor und Positionsgeber keine mechanische Verbindung besteht, sind Messungen auch durch eine Gehäusewand hindurch möglich. Das Spektrum der typischen Anwendungen reicht von der Handhabungs- und Robotertechnik über Förder- und Gebäudetechnik bis hin zu Dosier- und Durchflussmessaufgaben.
Aufbau und Funktion der Sensorelemente
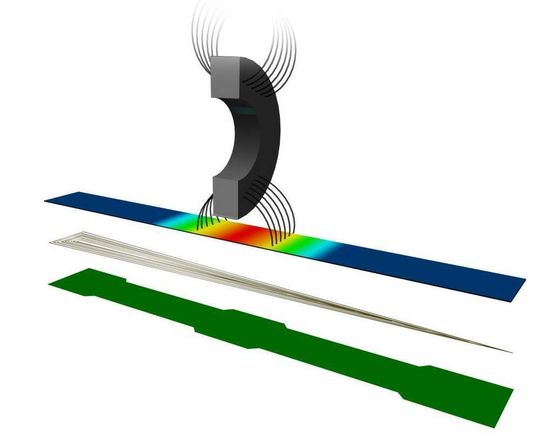
Das Messsystem setzt sich aus zwei Grundkomponenten zusammen: einem Sensor mit Sensorelement und Auswerteelektronik sowie einem Permanentmagneten als Positionsgeber. Viel Knowhow steckt im Sensorelement. Es besteht aus einer sehr flachen Spule mit dreieckförmigen Windungen. Diese Planarspule verfügt über einen ebenso flachen Kern aus weichmagnetischem Material, der auf die Spule aufgebracht wird und durch die magnetische Leitfähigkeit die Induktivität erhöht.
Fährt nun der magnetische Positionsgeber entlang der mit hochfrequentem Strom erregten Planarspule, bewirkt dies lokal eine lageabhängige Änderung der Spuleninduktivität. In Kombination mit der Auswerteelektronik ergibt sich dann eine monotone und nach Optimierung der Spulentopologie lineare Kennlinie.
In der Regel ist bei modernen magnetoinduktiven Sensoren die Elektronik direkt ins Gehäuse integriert. Sie sorgt neben der Auswertung der Induktivitätsänderung auch für die Korrektur von Umwelteinflüssen wie beispielsweise Temperatureffekten und elektromagnetischen Feldern. Damit wird eine Detektion des Targets nicht nur durch isolierende Medien wie Luft, Glas oder Flüssigkeiten möglich, sondern auch durch Trennwände aus dia- oder paramagnetischen Materialien. Die hochfrequenten Verluste in diesen Medien werden kompensiert, sodass die Charakteristik und die dynamischen Eigenschaften dieses Sensors praktisch unbeeinflusst bleiben.

Beeindruckend sind die Linearität und die Wiederholgenauigkeit der magnetoinduktiven Sensoren. Ihre Linearitätsfehler liegen lediglich bei ± 1,5% der Messbereichsobergrenze, die Reproduzierbarkeit ist besser als ± 60 µm. Dabei arbeiten Sensoren dieses Typs bei Geschwindigkeiten bis zu 5 m/s ohne nennenswerte Schleppfehler. Damit eignen sie sich auch für Anwendungen mit hohen Anforderungen an die Dynamik.
Positionserfassung an Minigreifern

Der wohl derzeit kleinste Sensor dieses Typs, der Micro-BIL, verfügt über ein Sensorelement zur Wegmessungen im Bereich von 0 bis zu 10 mm. Es ist das Gehäuse so klein, dass es in die weit verbreitete T-Nut von Pneumatikzylindern passt. Damit sind alle Voraussetzungen gegeben, um den Sensorwinzling beispielsweise auch an Minigreifern einsetzen zu können. Ein im Kolben des Pneumatikzylinders bzw. des pneumatischen Greifers integrierter Ringmagnet fungiert dann als Target für den Sensor. Dank seines analogen Ausgangssignals lassen sich beliebig viele Schaltpunkte in der Steuerung setzen. Und so können Anwender des Micro-BIL beispielsweise die Öffnungsweite von Minigreifern stufenlos steuern oder auch nur abrufen. Dieses Feedback wird dann unter anderem dazu genutzt, um falsch liegende Teile über eine abweichende Greiferstellung zu detektieren.
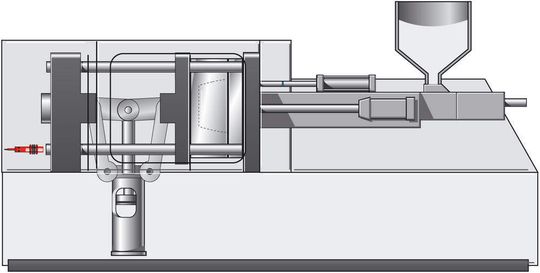
Sensorsystem 3: ferro-induktive Wegaufnehmer
Immer mehr Applikationen erfordern den Einsatz extrem schnell arbeitender Erfassungssysteme. Typische Beispiele hierfür sind Stanzen und Pressen mit sehr schnell oszillierenden Bewegungen, aber auch Prüfstände sowie Einspritzeinrichtungen an Spritzgießmaschinen.
Ferro-induktive Wegaufnehmer des Typs BIW sind für diese Aufgabenstellung prädestiniert. Sie arbeiten kontaktlos mit einer außergewöhnlich hohen Messrate von 20 KHz und liefern alle 50 µs einen neuen Messwert.

Der Sensor ist in ein Gehäuse aus widerstandsfähigem Strangpressprofil aus Aluminium integriert und damit unempfindlich gegenüber Erschütterungen, Vibrationen oder magnetischen Störfeldern. Er besteht aus einem Sender/Empfänger-Sensorelement und einem an einer Schubstange befestigten Schwingkreis. Diese Schubstange ist wiederum mit dem Maschinenteil verbunden, dessen Position zu bestimmen ist. Die Messkomponenten wirken berührungslos und gewährleisten so einen verschleißfreien Betrieb des gesamten Sensors.
Störungen von außen sind ohne Wirkung
Eine Erregerspule stimuliert den Schwingkreis, der dann an der aktuellen Position in die zwei Empfängerspulen ein Signal eingekoppelt. Die Position steht sofort am Ausgang der integrierten Auswerteelektronik als absolutes, analoges Ausgangsignal zur Verfügung und zwar wahlweise als fallendes oder steigendes Signal von 0 bis 10 V, mit einer Auflösung und Reproduzierbarkeit von weniger als 10 µm.
Alle drei Spulen sind Platz sparend auf einer Platine aufgedruckt und unterscheiden sich in ihrer Geometrie. Die Erregerspule ist rechteckig, die beiden dreieckigen Empfängerspulen sind gegensinnig angeordnet. Dadurch lässt sich die Differenz der eingekoppelten Wechselspannung für die Positionserkennung nutzen. Weil nur das Nutzsignal asymmetrisch auf die Empfängerspule wirkt, beeinträchtigen Störungen von außen das Messergebnis nicht. Entwickelt hat das neue, inzwischen patentierte Verfahren der Sensorspezialist Balluff.
(ID:264511)
:quality(80)/p7i.vogel.de/wcms/ad/39/ad398908c9f90b92d0d1f998c69f98e1/0128327423v2.jpeg "Der Dreifachobjektiv-Abstandssensor für Nahaufnahmen von Kyocera. Das Modul misst 28 mm x 30 mm x 40 mm. Die Kamera nutzt drei Objektive und eine proprietäre KI, um halbtransparente sowie dünne und feine linienförmige Objekte zu erkennen, die mit dem menschlichen Auge und herkömmlichen Stereokameras bisher nur schwer erkennbar waren. (Bild: Kyocera)")
:quality(80)/p7i.vogel.de/wcms/e9/99/e9996adfbaee2338aef422cf1314c48a/0124731822v3.jpeg "Bild 1: Wellen auf dem Wasser: Durch Überlagerung verstärken oder löschen sich die Wellen gegenseitig. Wie bei elektrischen Schwingkreisen entstehen Resonanzen, wenn bestimmte Bedingungen erfüllt sind. (Bild: © filins – stock.adobe.com)")