
:quality(80)/p7i.vogel.de/wcms/0b/99/0b9903e11b1cd8e5cdc52384d9177532/0131857635v2.jpeg "Dr. Alexander Noack steht neben dem QRNG-R19-Demonstrator. Dieser Quanten-Zufallszahlengenerator gewinnt echte Zufälligkeit aus Quanten-Vakuumfluktuationen. Auf Basis von intrinsisch zufälligen und unbeeinflussbaren Quanteneffekten werden echte Zufallszahlen mit Bitraten von 4 GBit/s erzeugt. (Bild: Fraunhofer IPMS)")
:quality(80)/p7i.vogel.de/wcms/fc/bc/fcbcbfa8f7881b7e4069ae1d2b0f11be/0131758679v2.jpeg "Energie sparen, schneller rechnen und Daten dauerhaft sichern: Die von Fraunhofer IPMS entwickelte und nach industriellen Prozessen von Globalfoundries gefertigte FRAM-Speichertechnologie soll genau diese Anforderungen erfüllen. (Bild: Fraunhofer / Piotr Banczerowski)")
:quality(80)/p7i.vogel.de/wcms/e9/ae/e9ae4d24c4dccb6f8fefcc08f7258e35/0131736205v2.jpeg "Antennenarray am Mast: Beamforming und HF‑Integration sind Schlüsselfaktoren für die Performance künftiger 6G‑Netze. (Bild: frei lizenziert)")
:quality(80)/p7i.vogel.de/wcms/a5/df/a5dfa5148af04ae072dfbf628009ef89/0131873657v3.jpeg "(Bild: Imec)")
:quality(80)/p7i.vogel.de/wcms/f0/1b/f01bf534ae26f5c6af66cbf13235b87a/0131857321v2.jpeg "AMD hat das in Kalifornien ansässige Startup Mext übernommen. Das von dem Unternehmen entwickelte Speicher-Tiering soll selten genutzte Daten auf NAND-Flash auslagern und so den DRAM-Bedarf in Rechenzentren entlasten. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/82/88/8288914a5dce25b3bbd9e9ea1655ac48/0131845817v2.jpeg "Federkontakte:
Aus einem federnden Pin wird ein elektromechanisches Ausgleichssystem, das verbindet, toleriert und stabilisiert. Zu sehen der Omniball Connector. (Bild: Mill-Max)")
:quality(80)/p7i.vogel.de/wcms/9a/3b/9a3bc2a33bb665879e03b0f66eb5efb4/0131913830v2.jpeg "Renesas hat Pictorus übernommen, um die Software-Entwicklung für eingebettete Anwendungen innerhalb der Renesas-365-Plattform zu vereinfachen und zu beschleunigen. Angaben zum Kaufpreis wurden in den vorliegenden Informationen nicht genannt. (Bild: Reneas)")
:quality(80)/p7i.vogel.de/wcms/7f/d4/7fd4df861429341a7bcafc51efedc9df/0131883654v2.jpeg "Digitale Souveränität: Deutschland und Frankreich wollen künftig gemeinsam stärker auf eigene Infrastrukturen, offene Technologien und besser geschützte Datenräume setzen. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/d9/d2/d9d2a4a29f3b12683dff26c973b43027/0131836310v2.jpeg "Quantencomputer Libra: Das fehlerkorrigierte System von Quera soll ab 2028 über Amazon Braket für komplexe kommerzielle Anwendungen verfügbar sein. (Bild: Quera)")
:quality(80)/p7i.vogel.de/wcms/88/34/8834f588cc03ac19278bf2c60cb0f467/0131907985v2.jpeg "Systemübergreifende Kontextintegration: KI-Agenten führen isolierte Daten aus ALM-, PLM- und ERP-Systemen zu fundierten Entscheidungsvorlagen zusammen. (Bild: PTC)")
:quality(80)/p7i.vogel.de/wcms/96/4c/964cf442a157e3bfdbc8b54480cc9872/0131874372v2.jpeg "Duo: Carrierboard „Just A Pi“ (oben) mit kaum sichtbarem Raspberry Pi CM5 (Bild: ARK Electronics)")
:quality(80)/p7i.vogel.de/wcms/03/14/031429a9de0cf9efcfbcd477e8b2ef02/0131907760v2.jpeg "Das Münchner Landgericht hat in zwei weiteren Patentrechtsklagen gegen das chinesische Unternehmen Innoscience zugunsten von Infineon entschieden. Doch in China befand der oberste Gerichtshof, dass hingegen Infineon ein Patent des chinesischen Konkurrenten verletzt haben soll. (Bild: frei lizenziert)")
:quality(80)/p7i.vogel.de/wcms/fc/8a/fc8abb4d63749d997f748520bbb69c2f/0131809996v2.jpeg "Dimensionen im Fokus: Eine vollständige Wheatstone-Brückenschaltung auf einer Fingerkuppe verdeutlicht den hohen Grad der Miniaturisierung der Sensortechnologie von Digid. (Bild: Digid)")
:quality(80)/p7i.vogel.de/wcms/1e/7a/1e7a37663aad5ee011b0f766d44e8ed9/0131765852v2.jpeg "Stromversorgungslösungen für Rechenzentren boomen, entsprechend gefragt sind SiC-Anwendungen. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/14/d7/14d7cb77132e76f852e71edf06cc94fb/0131803730v2.jpeg "Tom Trill, CEO von Qualinx, und Dr. Manfred Horstmann, Senior Vice President und General Manager bei GlobalFoundries (Bild: Globalfoundries)")
:quality(80)/p7i.vogel.de/wcms/5b/75/5b758a6d983e2380da34de7bd474d422/0131438570v2.jpeg "AMD Zynq Ultrascale+ MPSoC ZCU102 Evaluierungskit: Ob als fertiges System oder zur Vorevaluierung, die Implementierung eines RISC-V-Softcores auf einem FPGA kann sich mituner schwieriger gestalten als gedacht. (Bild: AMD)")
:quality(80)/p7i.vogel.de/wcms/2e/78/2e789ef76c84f5fcdf02b5697a22f9ab/0131062677v2.jpeg "Zur Stärkung des Portfolios insbesondere mit Blick auf Edge-Cloud-Infrastruktur für KI-Lösungen übernimmt Low-Power-FPGA-Spezialist Lattice Semiconductor den Firmware- und Cloud-Software-Entwickler AMI. (Bild: Lattice)")
:quality(80)/p7i.vogel.de/wcms/d4/1d/d41d81ec84a42b4fd5d732d36d0021ce/0130877962v2.jpeg "Im Element:
Auch fast 40 Jahre, nachdem sich der Elektrotechnik-Ingenieur als Berater für ASIC- und FPGA-Entwicklung selbstständig machte, hält Eugen Krassin immer noch Schulungen und Seminare zur programmierbaren Logik. (Bild: Toby Giessen)")
:quality(80)/p7i.vogel.de/wcms/0f/c4/0fc4f1c68ab438a1b827685f52aac47b/0131898344v2.jpeg "Die Electronica 2026 zeigt Technologien für resiliente Elektronik. (Bild: Messe München GmbH)")
:quality(80)/p7i.vogel.de/wcms/e8/42/e842dfba0064a29978935733ebc89eb0/0131831278v2.jpeg "Während Desktop-Systeme heute standardmäßig mit Exploit-Mitigation-Mechanismen abgesichert sind, fehlen vergleichbare Schutzmaßnahmen in vielen Embedded Devices noch immer. Das macht vernetzte Geräte im Feld zu einem attraktiven Angriffsziel und verschärft den Handlungsdruck für Hersteller. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/8b/a7/8ba78f02e76e08a21fe98487faa35225/0131725834v1.jpeg "Die Neugründung eines KI-Sicherheitsinstituts soll insbesondere auf die digitale Souveränität Deutschlands einzahlen. (Bild: Gemini / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/99/b3/99b3d1fd155da60b5591bcfd13c933b7/0131894777v2.jpeg "Mixed-Signal- und Leistungshalbleiter: Die Dienstleistungen der Cosmic-Gruppe begleiten Kunden von der ersten Designphase bis zum End-of-Line-Test. (Bild: Cosmic Group)")
:quality(80)/p7i.vogel.de/wcms/68/f3/68f330641144fa3f03d2676d0966ca03/0131585559v2.jpeg "Wearable: Die Kombination aus multimodaler Sensorik, Embedded AI und Echtzeitfeedback schafft eine neue Form der prozessintegrierten Werkerassistenz. (Bild: Voss Automotive)")
:quality(80)/p7i.vogel.de/wcms/a7/5e/a75e118eabb30306c3f2520615dd2ff0/0131786598v2.jpeg "Keysight beschleunigt mit der Hybrid-eCall-Zertifizierung den Fortschritt in der Notfallkommunikation für die Automobilindustrie. (Bild: Keysight)")
:quality(80)/p7i.vogel.de/wcms/2a/71/2a71552311c8bdae374ce140712fb2d2/0131890634v4.jpeg "Ein humanoider Roboter entnimmt ein Getränk aus dem Regal und stellt es auf dem Tresen bereit. Die Demonstration auf der Bosch Connected World 2026 zeigte zentrale Fähigkeiten humanoider Systeme in einem konkreten Handhabungsprozess. (Bild: SCHUNK SE & Co. KG)")
:quality(80)/p7i.vogel.de/wcms/ac/1f/ac1f342731c1e5c824527881268b214e/0131865780v2.jpeg "Siemens Industrial Edge ermöglicht es Kunden, Edge-Geräte und -Apps direkt am Produktionsstandort bereitzustellen und zu verwalten. Das App-Ökosystem sorgt für eine nahtlose Verbindung zu industriellen Anlagen, IT-Systemen und der Cloud. (Bild: Siemens)")
:quality(80)/p7i.vogel.de/wcms/44/ad/44ad8f8b18b29422f6e68bdc261397e1/0131904972v2.jpeg "Synopsys setzt auf systembewusstes Co-Design statt Overdesign. (Bild: Synopsys)")
:quality(80)/p7i.vogel.de/wcms/c6/bc/c6bc5289c9c128c1ca3fc990c52e7859/0131852659v2.jpeg "Waferfertigung bei Intel mit einer HIGH-NA-EUV-Anlage. Intel Foundry hat den Start der Risikoproduktion für den iterativ verbessrte Fertigungsprozess 18A-P angekündigt. Dieser soll nach Unternehmensangaben höhere Leistung, verbesserte thermische Eigenschaften sowie Kompatibilität mit den Designregeln von Intel 18A bieten. (Bild: Intel)")
:quality(80)/p7i.vogel.de/wcms/b2/90/b290f6da9e409cfc7d5a8aa2b78ec062/0131904956v2.jpeg "Georg Schlegel baut seinen Stammsitz Dürmentingen massiv aus. 2.800 Quardratmeter zusätzliche Nutzfläche kommen als Produktions- und Bürofläche hinzu. (Bild: Schlegel)")
:quality(80)/p7i.vogel.de/wcms/4e/41/4e4159d1e93e67d47bd2f51a90691b23/0131548978v2.jpeg "Transformation im Engineering: KI-gestützte Systeme generieren zunehmend selbstständig Schaltschranklayouts und entlasten Konstrukteure von zeitraubenden Routineaufgaben. (Bild: WSCAD)")
:quality(80)/p7i.vogel.de/wcms/d6/ea/d6eac438c362c545cab42ef0f30bcfc0/0130136975v2.jpeg "Die Bewerbungsphase für den James Dyson Award 2026 ist gestartet. (Bild: Dyson)")
:quality(80)/p7i.vogel.de/wcms/e5/6c/e56ceb935ba09cb66a4fd0f961b2d3e9/0129642888v2.jpeg "(Bild: Vogel Professional Education)")
Anbieter zum Thema
Kompromiss zwischen Rechengeschwindigkeit und Codegröße
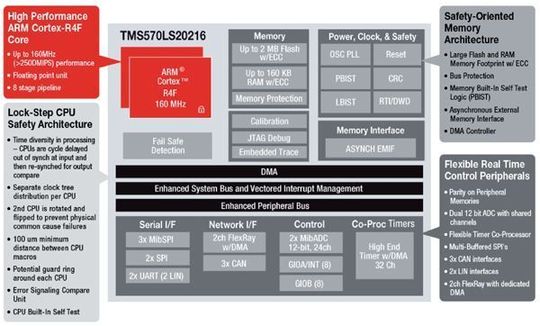
verfügbar Abhängig von den Anforderungen des Programmcodes kann der Cortex-R4F-Core dank des Thumb-2-Befehlssatzes abwechselnd 16- oder 32-Bit-Befehle verarbeiten. So wird ein Kompromiss zwischen Rechengeschwindigkeit und Codegröße erzielt. Die TMS570-Mikrocontroller sind derzeit mit integriertem Flash-Programmspeicher von 1 bis 2 MByte und mit einem Datenspeicher von 128 bis 160 KByte.
Frei programmierbarer Timer-Coprozessor
Eine wichtige Komponente der TMS570-Mikrocontroller zur Ansteuerung von elektrischen Motoren ist der High-End-Timer (NHET). Dabei handelt es sich um einen frei programmierbaren Timer-Coprozessor. Ein Programm steuert dabei bis zu 32 frei als Ein- oder Ausgang konfigurierbare Pins an. Dieses Programm wird während der System-Initialisierung in das RAM des NHET kopiert. Während des Betriebes kann die CPU neue Werte auf Datenfelder im NHET-RAM schreiben, um z.B. Pulsweiten-Modulation durchzuführen oder Capture-Werte auszulesen. Zum Verringern der CPU-Last können diese Schreib- oder Lese-Zugriffe auch per DMA oder von der HTU (High End Timer Transfer Unit), einem NHET-spezifischem DMA-Controller, durchgeführt werden.
Dank seiner Flexibilität ist der NHET vielseitig einsetzbar
Zum Ansteuern eines dreiphasigen Elektromotors müssen Timer-Module typischerweise sechs pulsweitenmodulierte Signale erzeugen, sodass mit Hilfe des erzeugten Pulsmusters an den Leistungsschaltern des Umrichters ein dreiphasiges Spannungssystem bestimmten Betrags und Phasenwinkels sowie vorgegebener Frequenz erzeugt wird. Generell ist es möglich, mit einem NHET-Modul zwei Dreiphasenmotoren anzusteuern. Es sind aber auch TMS570-Derivate mit zwei NHET-Modulen geplant. Aufgrund seiner hohen Flexibilität ist der NHET für viele unterschiedliche Aufgaben einsetzbar, etwa zum Ansteuern unterschiedlicher Inverterschaltungen. Zudem können mit dem NHET auch digitale Sensorsignale von Hall-Sensoren oder Inkrementalgebern eingelesen und ausgewertet werden.
A/D-Wandler speichern bis zu 64 Wandlerergebnisse in eigenem RAM
Zur Wandlung von analogen Sensorsignalen verfügen die derzeitigen TMS570LS über zwei Multi-input-buffered Analog-Digital-Wandler (MibADC) mit einer Auflösung von 12 Bit und 24 Eingangskanälen. Um die CPU-Last zu verringern, haben beide MibADC-Module einen eigenen Multi-buffered RAM in dem bis zu 64 Wandlungsergebnisse pro Modul abgespeichert und mittels CPU oder DMA ausgelesen werden können. Das NHET-Modul verfügt über umfangreiche Konfigurations-Möglichkeiten, um A/D-Wandlungen anzustoßen.
Wichtige Eingangssignale für den ADC sind in der Antriebsregelung die Phasenströme des Motors. Weitere Eingänge des ADCs sind typischerweise die Zwischenkreisspannungen am Umrichter, die Temperatur des Motors und gegebenenfalls die der Leistungsschalter. Zur Bestimmung der Rotorposition des Motors werden Sensoren mit analogen Sinus/Kosinus-Ausgängen oder mit digitalen Ausgängen eingesetzt.
Kommunikation mehrerer Antriebsregelungen
Da sich je nach Typ des Elektrofahrzeugs mehrere Elektromotoren im Fahrzeug befinden können, müssen auch mehrere Antriebsregelungen miteinander und/oder mit einer übergeordneten Regelung kommunizieren. Damit spielen die Kommunikationsschnittstellen eine große Rolle. Für eine abgestimmte Regelung und auch zur Anbindung an das übergeordnete Fahrzeug-Kommunikationssystems können wahlweise die integrierten FlexRay- oder CAN-Module des TMS570 verwendet werden. Zudem können Sensoren und ASICs via SPI- oder LIN/SCI-Modul mit dem Kontroller verbunden werden.
Fehler schnell erkennen und Gegenmaßnahmen einleiten
Das Rotor-Magnetfeld eines PMSM-Motors erregt die Statorspulen, solange sich der Motor dreht – und zwar auch im Falle eines Fehlers der Regelung, bei Kurzschlüssen im Umrichter oder in den Statorwicklungen des Motors. In solchen Fällen muss der Fehler schnell erkannt und Gegenmaßnahmen eingeleitet werden, um Schaden durch die Kurzschlussströme sowie vor allem ein gefährliches Bremsmoment des PMSM-Motors zu vermeiden.
Die Sicherheitsanforderungen hängen von der Fahrzeugarchitektur ab
Die Architektur des Elektrofahrzeugs ist entscheidend für die Sicherheitsbetrachtungen, die bei Mild-, Parallel- oder Seriell-Hybrids sehr unterschiedlich ausfällt. So werden z.B. bei einem Mild-Hybrid geringere Sicherheitsanforderungen an den elektrischen Antrieb gestellt als bei rein elektrischem Fahren. Es ist offenkundig, dass Bremsvorgänge sicherheitskritisch sind. Deshalb muss die Sicherheitsbetrachtung den Einsatz des Elektromotors im generatorischen Betrieb als Nutz- oder Rekuperationsbremse mit einschließen.
Sicherheit muss von allen Komponenten sichergestellt werden
Maßgeblich für die Entwicklung von sicherheitskritischen elektronischen Systemen einschließlich zugehöriger Entwicklungsprozesse und Qualitätsmaßnahmen ist die Norm IEC61508. Die Norm ISO26262 ist noch im Entwurfsstadium. Sie ist von der IEC61508 abgeleitet und wurde an sicherheitsrelevante elektrische/elektronische Systeme in Kraftfahrzeugen angepasst.
Ein sicherer Betrieb muss durch alle Komponenten des Elektroantriebs gewährleistet sein.
(ID:356586)
:quality(80)/p7i.vogel.de/wcms/0a/f9/0af9ef52ce077b935efc629bd4e357a6/0128162746v1.jpeg "Entwicklungsworkflow mit Renesas e² studio: Mit Renesas e² studio lassen sich IoT-Anwendungen von GitHub herunterladen, konfigurieren, entwickeln und auf RA-, RX- oder RZ-Controllern bereitstellen – inklusive Anbindung an AWS und Microsoft Azure. (Bild: Renesas Electronics Corporation)")
:quality(80)/p7i.vogel.de/wcms/51/be/51beb098c6a7b0e36878e833cb53a5c2/0128222643v2.jpeg "OpenTitan mit Secure Boot nach einem erfolgreichen Secure Boot-Startvorgang. (Bild: Google)")