
:quality(80)/p7i.vogel.de/wcms/22/0a/220a84ba1b9977d26fb4a212af5c8fec/0132339629v2.jpeg "Imec und Diraq haben erstmals den kohärenten Betrieb und die Auslesung eines linearen Arrays aus acht Silizium-MOS-Spin-Qubits demonstriert. (Bild: Imec)")
:quality(80)/p7i.vogel.de/wcms/f5/79/f579ee1713cb8c500cc5d5005c2fb3da/0132337035v3.jpeg "Einsatz auf dem Acker: Wie sich humanoide Systeme mit schweren landwirtschaftlichen Maschinen vernetzen lassen, wird in Ilmenau erprobt. (Bild: Fraunhofer IOSB)")
:quality(80)/p7i.vogel.de/wcms/ae/ba/aeba60e0ac4a340666d1813ba55b509b/0132229220v2.jpeg "Die Gründer von QuantumDiamonds: Dr. Fleming Bruckmaier (links) und Kevin Berghoff (rechts) (Bild: Quantum Diamonds GmbH)")
:quality(80)/p7i.vogel.de/wcms/7a/2c/7a2c782274dd2420ffb3b14e17585773/0132304402v2.jpeg "Swissbit und Nexperia gehen Hand in Hand: Sichere Speicher und robuste Halbleiter sollen zuverlässige KI- und Cloud-Infrastrukturen bieten. (Bild: Canva / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/e3/e0/e3e0e9b34c054cd1de2891ccb822ebe6/0132235494v2.jpeg "Bild 1: Der etwa 30 Meter große Ballonsatellit Echo 1 bei einem Aufblastest in einer Halle der NASA. (Bild: NASA)")
:quality(80)/p7i.vogel.de/wcms/09/32/0932508531439d49ed99fb6a8ee07c1b/0132236352v4.jpeg "Die neuen Hybrid-Aluminium-Elektrolytkondensatoren der HVX (-K)- und HTX (-K)-Serien von TAIYO YUDEN sind für 48-V-Automotive-Anwendungen ausgelegt und kombinieren einen niedrigen ESR mit hoher Strombelastbarkeit und einer Betriebstemperatur von bis zu 135 °C. (Bild: TAIYO YUDEN)")
:quality(80)/p7i.vogel.de/wcms/d0/b9/d0b92ad1ff97275bd7511a42be1758ec/0132135985v1.jpeg "Erst anschnallen, dann losfahren: Beim EU AI Act zahlt sich Vorsorge aus. Wer frühzeitig Schutzmaßnahmen etabliert, vermeidet Bußgelder und Reputationsschäden. (Bild: © Olga Ко - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/5c/47/5c47a19196fe05757947f2daddf8fa72/0132292701v1.jpeg "Symbolbild aus Berlin-Mitte: Die Bürgerinitiative Rechenzentrum Kronstorf hat für den 17. Juli eine Demonstration gegen den geplanten Ausbau des Google-Rechenzentrums angekündigt. (Bild: F* Google / Hossam el-Hamalawy / CC BY-SA 2.0 / flickr.com)")
:quality(80)/p7i.vogel.de/wcms/7b/da/7bda6a80466f1a5de0f4b60346b6f2b3/0132242139v5.jpeg "KI: Die große Black-Box in der Fabrik (Bild: Lucid Origin / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/46/41/464103e89109fbe52aaf3efc1a8311d9/0130524209v2.jpeg "Humanoide Roboter: Roboter, die vor wenigen Jahren noch eine Vision waren, sind heute dank KI, maschinellem Lernen und Echtzeit-Datenverarbeitung Realität. (Bild: Pete Linforth)")
:quality(80)/p7i.vogel.de/wcms/cc/0d/cc0defa1fd6dd4c26a647e92bf4d7ee0/0132255823v2.jpeg "Debix T62P-01: Industrieller Edge-Computer für Echtzeitanwendungen. (Bild: Debix)")
:quality(80)/p7i.vogel.de/wcms/28/3e/283eb7efa47f9d481b361d765f774890/0132340824v2.jpeg "Die Differenzierung im Bereich der SiC-MOSFETs findet nicht mehr ausschließlich auf dem Datenbaltt statt. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/f4/09/f4093b623fb87b18750f2f69a0e986b3/0132332557v3.jpeg "Demonstrator eines bidirektionalen einphasigen 3-kW-DC-Ladegeräts mit GaN-Leistungselektronik. Das leistungselektronische Modul (oben) haben Forschende des Fraunhofer IAF auf Basis des Leistungshalbleiters Galliumnitrid (GaN) und alternativen isolierenden Substraten entwickelt. Die Realisierung des Demonstrators sowie die Integration des Moduls erfolgte durch den GaN4EmoBiL-Projektpartner Ambibox. (Bild: Fraunhofer IAF)")
:quality(80)/p7i.vogel.de/wcms/07/75/07752828e481b63f57e3f576e28f7697/0132293464v2.jpeg "Kabellose Energieversorgung: Positionstolerante induktive Ladesysteme erreichen hohe Wirkungsgrade und bieten sich als Alternative zu Steckerkontakten oder Batteriewechseln an. (Bild: Gemini / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/8a/2e/8a2e7d2a89ffe55c545dd6c831ed154e/0132246788v2.jpeg "Über 500 Teilnehmer, 120 Referenten: Die FPGA Conference Europe platzte in diesem Jahr aus allen Nähten – und wurde ihrem Anspruch als Leitkongress der FPGA-Welt einmal mehr gerecht. (Bild: Tobi Giessen)")
:quality(80)/p7i.vogel.de/wcms/06/a1/06a158e32b18d99fcea65547cec5d4c7/0132069489v2.jpeg "Mit direkter Integration von Speicher ins Chip-Package verspricht AMD mit dem Versal Premium Gen 2 SoC eine schnellere Datenübertragung, verringerte Latenz und einem potentiell geringere Stromverbrauch. (Bild: AMD)")
:quality(80)/p7i.vogel.de/wcms/86/2a/862afb1de8423bb7401098a2fd268281/0131792672v2.jpeg "Bild 1: Ein Spannungsversorgungskonzept für Lasten, welche eine vorgegebene Ein- und Abschaltreihenfolge (Sequencing) benötigen. (Bild: ADI)")
:quality(80)/p7i.vogel.de/wcms/14/d7/14d7cb77132e76f852e71edf06cc94fb/0131803730v2.jpeg "Tom Trill, CEO von Qualinx, und Dr. Manfred Horstmann, Senior Vice President und General Manager bei GlobalFoundries (Bild: Globalfoundries)")
:quality(80)/p7i.vogel.de/wcms/42/05/4205a77daea554e39c03c398bc80be76/0132134554v1.jpeg "Das ist das System aus Deutschland, das Europa in Sachen Cybersicherheit bei vernetzen Geräter aller Art Souveränität und Transparenz geben soll: Das Fraunhofer-„RISC-V Secure Element“. Hier mehr dazu ... (Bild: Fraunhofer IIS / J. Ernst)")
:quality(80)/p7i.vogel.de/wcms/f1/17/f1176c05616af1272eb5d7f9e4454291/0132149039v2.jpeg "Smart Home: Smarte Geräte werden immer beliebter. Doch das Sicherheitsrisiko bleibt. (Bild: Pete Linforth)")
:quality(80)/p7i.vogel.de/wcms/fb/60/fb600e7355d71b25f0b7ddf03c61a5a3/0132176619v2.jpeg "Vision Engineering zeigt die Produkte unter anderem auf der Euro Defence Expo in Halle 3 / 3A79 vom 22.bis zum 25.09.2026. (Bild: Vision Engineering)")
:quality(80)/p7i.vogel.de/wcms/2b/6b/2b6b15dd45ba688abde2aa441320b88c/0132065385v2.jpeg "Pilot S20: Er kam Ende der 1990er-Jahre auf den Markt und war die direkte Weiterentwicklung des allerersten Pilot-Systems von 1995. Mit dem Modell schaffte Seica den internationalen Durchbruch gegen die großen Player wie GenRad oder Teradyne. (Bild: Seica)")
:quality(80)/p7i.vogel.de/wcms/53/aa/53aabb1fbfa0109dae306db179cbae57/0132111908v2.jpeg "So sind die Forschenden vorgegangen: Mithilfe von Laserstrahlen (rot) wurde das gefangene Ion (grün) zunächst abgekühlt und dann an einer bestimmten Stelle positioniert. Dort mass das Ion dann die Störfelder. (Bild: Tobias Sägesser / ETH Zürich)")
:quality(80)/p7i.vogel.de/wcms/06/08/0608efddacd3cb318aa5cdad412b7830/0132310840v2.jpeg "Smart Manufacturing in der Praxis: Der Schritt von isolierten Insellösungen hin zu einer werksübergreifend vernetzten Datenarchitektur bleibt für viele Hersteller die größte Hürde. (Bild: Gemini / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/bc/50/bc506f9d85e07d812a31d7a89c0c06b8/0132345885v2.jpeg "Der EMS-Tag ist keine Veranstaltung zum Absitzen, sondern ein kompakter Branchentreff für alle, die wissen wollen, wohin sich die EMS-Branche entwickelt und welche Entscheidungen jetzt wichtig werden. Neben den Vorträgen steht der persönliche Austausch im Mittelpunkt: mit anderen EMS-Dienstleistern, mit Kunden, Partnern, Experten und Menschen, die vor ähnlichen Fragen stehen. (Bild: VCG /ELEKTRONIKPRAXIS)")
:quality(80)/p7i.vogel.de/wcms/f3/a8/f3a82b0c6191d19a05f630b94ac63c56/0132340832v2.jpeg "High-NA-EUV-Anlage von ASML: Das Lithografieverfahren kommt bislang meist in der Prototypen- oder Forschungsentwicklung zum Einsatz. Nun hat Intel Foundry die Technologie erstmals bei der Serienfertigung von Logikchips verwendet – zumindest teilweise. (Bild: AMSL)")
:quality(80)/p7i.vogel.de/wcms/93/f7/93f75a88d3bca237f7d0e83756f952ee/0132324517v2.jpeg "Halbleiterförderung: Mit 659 Millionen Euro unterstützt Deutschland vier neue Anlagen für SiC-Wafer, Leistungshalbleiter, Messtechnik und spezialisierte Detektorchips. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/a0/fb/a0fb0f0a0051839762c044fcff3a221e/0132309919v2.jpeg "Bitte mehr Gas geben! Die Bürokratie in Deutschland hat überhandgenommen, wie die Industrie klagt. Es wird zwar entbürokratisiert, aber das geht der Industrie viel zu langsam ... (Bild: Bürohengst)")
:quality(80)/p7i.vogel.de/wcms/4e/41/4e4159d1e93e67d47bd2f51a90691b23/0131548978v2.jpeg "Transformation im Engineering: KI-gestützte Systeme generieren zunehmend selbstständig Schaltschranklayouts und entlasten Konstrukteure von zeitraubenden Routineaufgaben. (Bild: WSCAD)")
:quality(80)/p7i.vogel.de/wcms/d6/ea/d6eac438c362c545cab42ef0f30bcfc0/0130136975v2.jpeg "Die Bewerbungsphase für den James Dyson Award 2026 ist gestartet. (Bild: Dyson)")
:quality(80)/p7i.vogel.de/wcms/e5/6c/e56ceb935ba09cb66a4fd0f961b2d3e9/0129642888v2.jpeg "(Bild: Vogel Professional Education)")
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/68800/68851/65.jpg "Logo.jpg ()")
IEEE 802.1as Zeitsynchronization
802.1as basiert auf der Zeitsynchronizationsspezifikation IEEE 1588, die UDP-Pakete (User Datagram Protocol) über IP benutzt, um das Netzwerk zu synchronisieren, wobei eine übliche 8-kHz-Uhr benutzt wird.
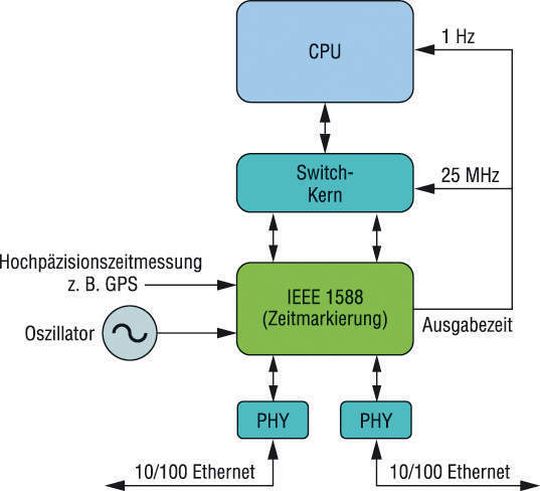
Bild 3 zeigt eine typische Hardware-Implementierung der IEEE 802.1as/1588-Funktionalität. Viele der industriellen, in Echtzeit gesteuerten Ethernet-Netzwerke haben IEEE 1588 übernommen. Um eine Synchronisierung mit restlichen Netzwerk zu erzielen, muss jeder Knoten wissen, welche Uhr er benutzen muss. Alle Knoten müssen den „Best Master Clock“-Algorithmus befolgen, um die Taktung zu ermitteln. Ist ein Knoten der Master für andere Knoten im Ring, wird eine Hochpräzisionsquelle wie z.B. GPS benutzt.
Ist ein Knoten nicht als Master festgelegt, wird er die Zeitmessung aus dem Netzwerk nach Protokoll 1588 beziehen. Wird die genaue Taktung nicht vom Netzwerk bereitgestellt, kommt der lokale On-Board-Oszillator zum Einsatz. Der Master ist für das Bereitstellen seiner Position an alle Slaves im Netzwerk verantwortlich. Empfängt ein Slave von seinem Master keine Information, ernennt er sich selbst zum Master.
Um Master und Slaves zu synchronisieren, betreibt 1588 ein PTP (Precise Time Protocol), basierend auf IP-Multicasting. Der Switch muss PTP-Pakete identifizieren und die Ingress- und Egress-PTP-Pakete mit einem Zeitstempel versehen. In der Ingress-Richtung leitet der Switch die eingehenden PTP-Pakete direkt an den Prozessor-Port weiter.
Die zwei Phasen der Synchronisierung
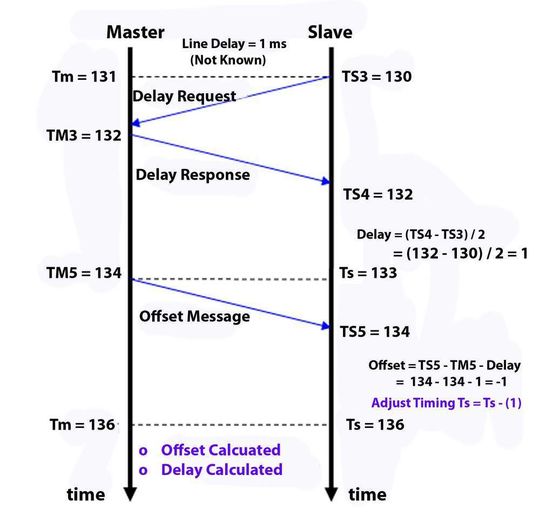
Der Synchronisierungsvorgang verläuft in zwei Phasen: Zunächst wird die Offset-Zeit zwischen Master und Slave berechnet und korrigiert. Um diese Funktion ausführen zu können, sendet der Master kontinuierlich in bestimmten Intervallen eine spezifische Nachricht an den Slave, normalerweise alle 10 ms. Die zweite Phase des Synchronisierungsvorgangs ist die Verzögerungsmessung. Der Slave sendet eine Verzögerungsanfrage an den Master, die zurückgesendet wird. Dieser Roundtrip wird mithilfe der Zeitstempel berechnet.
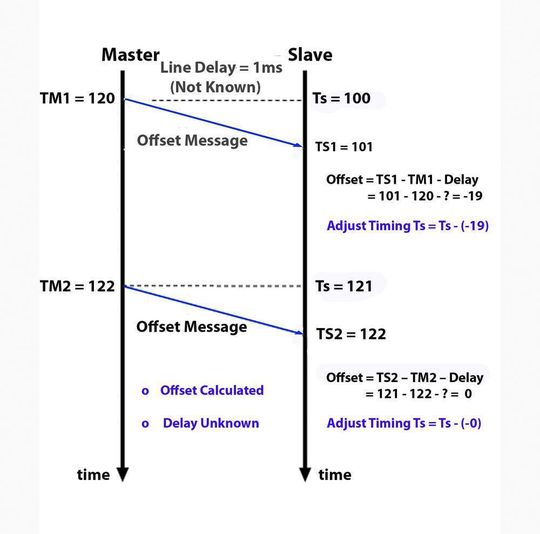
Man nimmt an, dass die Verzögerung zwischen Master und Slave immer symmetrisch ist. Bild 4a und 4b zeigen beispielhafte Offset- und Verzögerungsphasen des PTP-Synchronisierungsvorgangs.
Um den erforderlichen Latenz-Jitter zu erzielen, beträgt die zugelassene Abweichung etwa 4 ppm, was einer Abweichung von 4 ns alle 10 ms im Synchronisierungszyklus entspricht.
(ID:280443)
:quality(80)/p7i.vogel.de/wcms/f8/d6/f8d61582200067cd5d0017b93f27cec9/0131653956v2.jpeg "Zeitsynchronisation in der Messtechnik: Durch Protokolle wie IEEE 1588 oder „White Rabbit“ lassen sich verteilte Messdaten heute bis in den Pikosekunden-Bereich synchronisieren. (Bild: TSEP)")
:quality(80)/p7i.vogel.de/wcms/bb/a3/bba376fb873fd5a1e2653a10011d68e5/0126523280v3.jpeg "Kompakt und robust: die Profinet-Switches Planet IGS-800T-PN und IGS-820TF-PN (Bild: Spectra)")