
:quality(80)/p7i.vogel.de/wcms/22/0a/220a84ba1b9977d26fb4a212af5c8fec/0132339629v2.jpeg "Imec und Diraq haben erstmals den kohärenten Betrieb und die Auslesung eines linearen Arrays aus acht Silizium-MOS-Spin-Qubits demonstriert. (Bild: Imec)")
:quality(80)/p7i.vogel.de/wcms/f5/79/f579ee1713cb8c500cc5d5005c2fb3da/0132337035v3.jpeg "Einsatz auf dem Acker: Wie sich humanoide Systeme mit schweren landwirtschaftlichen Maschinen vernetzen lassen, wird in Ilmenau erprobt. (Bild: Fraunhofer IOSB)")
:quality(80)/p7i.vogel.de/wcms/ae/ba/aeba60e0ac4a340666d1813ba55b509b/0132229220v2.jpeg "Die Gründer von QuantumDiamonds: Dr. Fleming Bruckmaier (links) und Kevin Berghoff (rechts) (Bild: Quantum Diamonds GmbH)")
:quality(80)/p7i.vogel.de/wcms/7a/2c/7a2c782274dd2420ffb3b14e17585773/0132304402v2.jpeg "Swissbit und Nexperia gehen Hand in Hand: Sichere Speicher und robuste Halbleiter sollen zuverlässige KI- und Cloud-Infrastrukturen bieten. (Bild: Canva / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/e3/e0/e3e0e9b34c054cd1de2891ccb822ebe6/0132235494v2.jpeg "Bild 1: Der etwa 30 Meter große Ballonsatellit Echo 1 bei einem Aufblastest in einer Halle der NASA. (Bild: NASA)")
:quality(80)/p7i.vogel.de/wcms/09/32/0932508531439d49ed99fb6a8ee07c1b/0132236352v4.jpeg "Die neuen Hybrid-Aluminium-Elektrolytkondensatoren der HVX (-K)- und HTX (-K)-Serien von TAIYO YUDEN sind für 48-V-Automotive-Anwendungen ausgelegt und kombinieren einen niedrigen ESR mit hoher Strombelastbarkeit und einer Betriebstemperatur von bis zu 135 °C. (Bild: TAIYO YUDEN)")
:quality(80)/p7i.vogel.de/wcms/d0/b9/d0b92ad1ff97275bd7511a42be1758ec/0132135985v1.jpeg "Erst anschnallen, dann losfahren: Beim EU AI Act zahlt sich Vorsorge aus. Wer frühzeitig Schutzmaßnahmen etabliert, vermeidet Bußgelder und Reputationsschäden. (Bild: © Olga Ко - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/5c/47/5c47a19196fe05757947f2daddf8fa72/0132292701v1.jpeg "Symbolbild aus Berlin-Mitte: Die Bürgerinitiative Rechenzentrum Kronstorf hat für den 17. Juli eine Demonstration gegen den geplanten Ausbau des Google-Rechenzentrums angekündigt. (Bild: F* Google / Hossam el-Hamalawy / CC BY-SA 2.0 / flickr.com)")
:quality(80)/p7i.vogel.de/wcms/7b/da/7bda6a80466f1a5de0f4b60346b6f2b3/0132242139v5.jpeg "KI: Die große Black-Box in der Fabrik (Bild: Lucid Origin / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/46/41/464103e89109fbe52aaf3efc1a8311d9/0130524209v2.jpeg "Humanoide Roboter: Roboter, die vor wenigen Jahren noch eine Vision waren, sind heute dank KI, maschinellem Lernen und Echtzeit-Datenverarbeitung Realität. (Bild: Pete Linforth)")
:quality(80)/p7i.vogel.de/wcms/cc/0d/cc0defa1fd6dd4c26a647e92bf4d7ee0/0132255823v2.jpeg "Debix T62P-01: Industrieller Edge-Computer für Echtzeitanwendungen. (Bild: Debix)")
:quality(80)/p7i.vogel.de/wcms/89/17/8917ac8f43a91e8e6eebdd301d00bf4e/0132223314v5.jpeg "Der Kongress „Power of Electronics“ vermittelt praxisnahes Wissen rund um das Power Design – von Magnetik und Stromversorgungen bis hin zu EMV und aktuellen Entwicklungen in der Leistungselektronik. (Bild: Stefan Bausewein)")
:quality(80)/p7i.vogel.de/wcms/28/3e/283eb7efa47f9d481b361d765f774890/0132340824v2.jpeg "Die Differenzierung im Bereich der SiC-MOSFETs findet nicht mehr ausschließlich auf dem Datenbaltt statt. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/f4/09/f4093b623fb87b18750f2f69a0e986b3/0132332557v3.jpeg "Demonstrator eines bidirektionalen einphasigen 3-kW-DC-Ladegeräts mit GaN-Leistungselektronik. Das leistungselektronische Modul (oben) haben Forschende des Fraunhofer IAF auf Basis des Leistungshalbleiters Galliumnitrid (GaN) und alternativen isolierenden Substraten entwickelt. Die Realisierung des Demonstrators sowie die Integration des Moduls erfolgte durch den GaN4EmoBiL-Projektpartner Ambibox. (Bild: Fraunhofer IAF)")
:quality(80)/p7i.vogel.de/wcms/8a/2e/8a2e7d2a89ffe55c545dd6c831ed154e/0132246788v2.jpeg "Über 500 Teilnehmer, 120 Referenten: Die FPGA Conference Europe platzte in diesem Jahr aus allen Nähten – und wurde ihrem Anspruch als Leitkongress der FPGA-Welt einmal mehr gerecht. (Bild: Tobi Giessen)")
:quality(80)/p7i.vogel.de/wcms/06/a1/06a158e32b18d99fcea65547cec5d4c7/0132069489v2.jpeg "Mit direkter Integration von Speicher ins Chip-Package verspricht AMD mit dem Versal Premium Gen 2 SoC eine schnellere Datenübertragung, verringerte Latenz und einem potentiell geringere Stromverbrauch. (Bild: AMD)")
:quality(80)/p7i.vogel.de/wcms/86/2a/862afb1de8423bb7401098a2fd268281/0131792672v2.jpeg "Bild 1: Ein Spannungsversorgungskonzept für Lasten, welche eine vorgegebene Ein- und Abschaltreihenfolge (Sequencing) benötigen. (Bild: ADI)")
:quality(80)/p7i.vogel.de/wcms/14/d7/14d7cb77132e76f852e71edf06cc94fb/0131803730v2.jpeg "Tom Trill, CEO von Qualinx, und Dr. Manfred Horstmann, Senior Vice President und General Manager bei GlobalFoundries (Bild: Globalfoundries)")
:quality(80)/p7i.vogel.de/wcms/42/05/4205a77daea554e39c03c398bc80be76/0132134554v1.jpeg "Das ist das System aus Deutschland, das Europa in Sachen Cybersicherheit bei vernetzen Geräter aller Art Souveränität und Transparenz geben soll: Das Fraunhofer-„RISC-V Secure Element“. Hier mehr dazu ... (Bild: Fraunhofer IIS / J. Ernst)")
:quality(80)/p7i.vogel.de/wcms/f1/17/f1176c05616af1272eb5d7f9e4454291/0132149039v2.jpeg "Smart Home: Smarte Geräte werden immer beliebter. Doch das Sicherheitsrisiko bleibt. (Bild: Pete Linforth)")
:quality(80)/p7i.vogel.de/wcms/fb/60/fb600e7355d71b25f0b7ddf03c61a5a3/0132176619v2.jpeg "Vision Engineering zeigt die Produkte unter anderem auf der Euro Defence Expo in Halle 3 / 3A79 vom 22.bis zum 25.09.2026. (Bild: Vision Engineering)")
:quality(80)/p7i.vogel.de/wcms/2b/6b/2b6b15dd45ba688abde2aa441320b88c/0132065385v2.jpeg "Pilot S20: Er kam Ende der 1990er-Jahre auf den Markt und war die direkte Weiterentwicklung des allerersten Pilot-Systems von 1995. Mit dem Modell schaffte Seica den internationalen Durchbruch gegen die großen Player wie GenRad oder Teradyne. (Bild: Seica)")
:quality(80)/p7i.vogel.de/wcms/53/aa/53aabb1fbfa0109dae306db179cbae57/0132111908v2.jpeg "So sind die Forschenden vorgegangen: Mithilfe von Laserstrahlen (rot) wurde das gefangene Ion (grün) zunächst abgekühlt und dann an einer bestimmten Stelle positioniert. Dort mass das Ion dann die Störfelder. (Bild: Tobias Sägesser / ETH Zürich)")
:quality(80)/p7i.vogel.de/wcms/42/df/42dff62c518b703e4d810c8a559b9b98/0132338696v2.jpeg "Neue Zukunft für Automatisierungsingenieure: KI übernimmt Routineaufgaben, während tiefes Verständnis für Maschinen und Prozesse unerlässlich bleibt. (Bild: Rockwell)")
:quality(80)/p7i.vogel.de/wcms/06/08/0608efddacd3cb318aa5cdad412b7830/0132310840v2.jpeg "Smart Manufacturing in der Praxis: Der Schritt von isolierten Insellösungen hin zu einer werksübergreifend vernetzten Datenarchitektur bleibt für viele Hersteller die größte Hürde. (Bild: Gemini / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/bc/50/bc506f9d85e07d812a31d7a89c0c06b8/0132345885v2.jpeg "Der EMS-Tag ist keine Veranstaltung zum Absitzen, sondern ein kompakter Branchentreff für alle, die wissen wollen, wohin sich die EMS-Branche entwickelt und welche Entscheidungen jetzt wichtig werden. Neben den Vorträgen steht der persönliche Austausch im Mittelpunkt: mit anderen EMS-Dienstleistern, mit Kunden, Partnern, Experten und Menschen, die vor ähnlichen Fragen stehen. (Bild: VCG /ELEKTRONIKPRAXIS)")
:quality(80)/p7i.vogel.de/wcms/f3/a8/f3a82b0c6191d19a05f630b94ac63c56/0132340832v2.jpeg "High-NA-EUV-Anlage von ASML: Das Lithografieverfahren kommt bislang meist in der Prototypen- oder Forschungsentwicklung zum Einsatz. Nun hat Intel Foundry die Technologie erstmals bei der Serienfertigung von Logikchips verwendet – zumindest teilweise. (Bild: AMSL)")
:quality(80)/p7i.vogel.de/wcms/93/f7/93f75a88d3bca237f7d0e83756f952ee/0132324517v2.jpeg "Halbleiterförderung: Mit 659 Millionen Euro unterstützt Deutschland vier neue Anlagen für SiC-Wafer, Leistungshalbleiter, Messtechnik und spezialisierte Detektorchips. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/4e/41/4e4159d1e93e67d47bd2f51a90691b23/0131548978v2.jpeg "Transformation im Engineering: KI-gestützte Systeme generieren zunehmend selbstständig Schaltschranklayouts und entlasten Konstrukteure von zeitraubenden Routineaufgaben. (Bild: WSCAD)")
:quality(80)/p7i.vogel.de/wcms/d6/ea/d6eac438c362c545cab42ef0f30bcfc0/0130136975v2.jpeg "Die Bewerbungsphase für den James Dyson Award 2026 ist gestartet. (Bild: Dyson)")
:quality(80)/p7i.vogel.de/wcms/e5/6c/e56ceb935ba09cb66a4fd0f961b2d3e9/0129642888v2.jpeg "(Bild: Vogel Professional Education)")
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/111200/111228/65.jpg "RECOM_Logo.jpg ()")
Das elektronische Steuergerät regelt den Elektromotor
Bei einem EPS-System regelt das Steuergerät hauptsächlich den Elektromotor, der in Abhängigkeit des am Lenkrad vom Fahrer erzeugten Drehmoments zusätzliche Lenkkraft über die entsprechende Mechanik auf die Räder ausübt. Es werden sowohl dreiphasige Asynchron- als auch Synchronmotoren eingesetzt. Wegen ihrer guten Effizienz, der hohen Leistungsdichte und einem hohen Drehmoment auch bei niedrigen Drehzahlen sind Permanent-Magnet-Synchronmotoren sehr verbreitet.
Der Mikrokontroller — das Herz des elektrischen Lenksystems
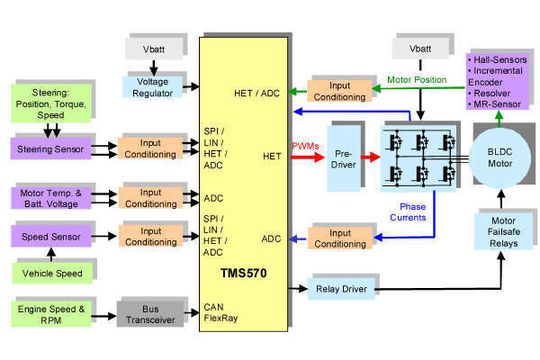
Die Steuereinheit eines elektrischen Lenksystems besteht im Wesentlichen aus dem Mikrokontroller, Komponenten zur Regelung und Überwachung des Motors und Bausteinen für Aufbereitung von Sensorsignalen, Kommunikation und Spannungsversorgung.
Um einen dreiphasigen Elektromotor anzusteuern, müssen vom Zeitgeber des Mikrokontrollers sechs pulsweitenmodulierte Signale zur Verfügung gestellt werden, die über die Leistungsendstufen den Motor ansteuern.
A/D-Wandler im Mikroconroller wandeln Sensordaten zur weiteren Verarbeitung
Zur Drehmoment-Regelung des Motors werden die Phasenströme an einem oder mehreren Messpunkten in den Leistungspfaden erfasst. Des Weiteren können auch Phasenspannungen und die Temperatur der Treiberendstufen überwacht werden, um im Fehlerfalle geeignete Maßnahmen zu ergreifen. Diese Signale werden dem im Mikrokontroller befindlichen A/D-Wandler zur weiteren Verarbeitung zugeführt.
Aus Sicherheitsgründen kann der Motor im Fehlerfalle über ein Motorrelais abgeschaltet werden, wodurch die aktive Lenkunterstützung nicht mehr zur Verfügung steht.
Zur Bestimmung der Rotorposition werden im allgemeinen Sensoren mit analogen- (z.B. Sinus/Cosinus) oder digitalen Ausgängen (z.B. Inkrementalgeber, Hall Sensoren) eingesetzt. Diese Signale können je nach Sensorart mit dem A/D-Wandler oder dem digitalen Zeitgeber eingelesen und verarbeitet werden.
Lenkradposition und vom Fahrer aufgebrachtes Drehmoment am Lenkrad werden über entsprechende Sensoren aufgenommen, aufbereitet und zur weiteren Verarbeitung dem Mikrokontroller zur Verfügung gestellt. Diese Sensoren liefern je nach Ausführung analoge oder digitale Signale, welche entweder über einen A/D-Wandler oder digitale Schnittstellen wie Serielle Synchrone Schnittstelle, LIN-Bus-Schnittstelle oder Zeitgeber an den Mikrokontroller angebunden werden.
Aus Sicherheitsgründen können auch weitere Signale wie Batteriespannung und Motortemperatur mitüberwacht werden. Andere elektronische Steuereinheiten führen dem Mikrokontroller weitere Informationen als Eingangsparameter zu, z.B. die Fahrzeuggeschwindigkeit. Dies geeschieht über das Bussystem, das als CAN- oder FlexRay-Bus ausgeführt sein kann.
Artikelfiles und Artikellinks
(ID:314101)
:quality(80)/p7i.vogel.de/wcms/2a/d1/2ad1b7206e2454cff86915a6ca926822/0127453196v3.jpeg "Bordnetze:
Typischerweise besitzen Elektrofahrzeuge sowohl eine HV- als auch eine LV-Batterie. Durch den Einsatz von DC/DC-Wandlern lässt sich diese jedoch einsparen und Gewicht reduzieren. (Bild: © Sergii Chernov - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/d9/10/d91090b58a45f6c5e36af75ced88994d/0129691251v2.jpeg "Echtzeit-Datenerfassung: Mit 10 GSPS und integriertem FPGA beschleunigt der neue PCIe-Digitalisator anspruchsvolle ATE- und LiDAR-Systeme. (Bild: Teledyne)")