:quality(80)/p7i.vogel.de/wcms/ce/09/ce09cbfd70dd50b7f8e9e923c4fd8f3d/0129481054v2.jpeg "Im neuen Projekt „CircEL“ erforschen Ingenieure und Juristen gemeinsam Wege zu einer wirklichen Kreislaufwirtschaft. Die Carl-Zeiss-Stiftung fördert das Forschungsprojekt mit drei Millionen Euro für die kommenden sechs Jahre. (Bild: Silvia Wolf / Universität Freiburg)")
:quality(80)/p7i.vogel.de/wcms/59/bf/59bfd2822d711b0ae2cb9383b679f38d/0129302533v2.jpeg "Im Lehrstuhl für KI-Chip Design in der Technischen Universität München (TUM) ist der EU-weit erste KI-Chip mit moderner 7-Nanometer-Technologie entstanden. Im Bild: Lehrstuhlinhaber Prof. Hussam Amrouch. (Bild: Andreas Heddergott / TU Muenchen)")
:quality(80)/p7i.vogel.de/wcms/c1/94/c19403fe0194686b2f4911be7e1e9539/0129294209v2.jpeg "Supraleitung kann verborgene magnetische Ordnungen offenlegen, indem sie gezwungen wird, ihre eigenen Symmetrien zu brechen. (Bild: frei lizenziert)")
:quality(80)/p7i.vogel.de/wcms/ca/81/ca81333a02b8c934dcad5c1745435a3d/0125018126v2.jpeg "Gehäuseschirmung und EMV: Ein umfassender Leitfaden zum Thema gibt der fünfteilige Beitrag. Teil 1 thematisiert Emissionsquellen auf der Leiterplatte. (Bild: Papisut - stock.adobe.com / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/06/ce/06cece1c695ea91c5108cf7f583feea5/0129540778v2.jpeg "Vernetzte Industrie: Panasonic präsentiert neue Funkmodule und Sensortechnologien auf der diesjährigen Embedded World. (Bild: Panasonic)")
:quality(80)/p7i.vogel.de/wcms/79/33/7933c5529f1bbc132e7935d7c53b6beb/0129501631v2.jpeg "Molekularer Wandel in der Industrie: Das drohende PFAS-Verbot zwingt Hersteller zum Umdenken. Unternehmen wie igus entwickeln bereits Hochleistungskunststoffe, die komplett ohne das Fluorpolymer PTFE auskommen, im Labor aber gleiche tribologischen Eigenschaften beweisen. (Bild: Igus)")
:quality(80)/p7i.vogel.de/wcms/3f/69/3f69e2ac28f7f9ee735680c5e5d53d94/0129470810v2.jpeg "Demo des ChipStack AI Super Agent. (Bild: Cadence)")
:quality(80)/p7i.vogel.de/wcms/7b/57/7b5725dd2e7545ab4904a9b7a3735721/0129309389v2.jpeg "Die embedded world 2026 findet vom 10. bis zum 12. März 2026 statt. (Bild: NürnbergMesse / Thomas Geiger)")
:quality(80)/p7i.vogel.de/wcms/b1/77/b1770e7d7499d7f807a2d5236dc081c8/0129461958v2.jpeg "Dr. Joshua Fryman, Intel Fellow und CTO der Intel Government Technologies (Mitte), stellte zusammen mit Vertretern der Softbank-Tochter Saimemory den ersten Prototypen des neuartigen ZAM-Speichers auf der Intel-Hausmesse Intel Connection 2026 in Japan vor. (Bild: Intel Japan)")
:quality(80)/p7i.vogel.de/wcms/9d/f7/9df7b15f177b8b3ca0e93cf965a476bc/0129529705v2.jpeg "Speicherfehler wie Pufferüberläufe oder Use-After-Free gefährden die Stabilität von Fahrzeugsoftware. Formale Verifizierung hilft dabei, aus getesteter Software nachweislich sichere Systeme zu machen. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/67/3f/673f67f2c8dbef2f0f6a5d01ec1f5ec6/0129505643v2.jpeg "Arduino App Lab: Das aktuelle Release 0.4.0 bringt etliche hilfreiche Neuerungen. (Bild: Arduino)")
:quality(80)/p7i.vogel.de/wcms/1d/e5/1de5e11918cfb261b8b5c4632fc1f7db/0129456364v3.jpeg "An drei Standorten in Litauen entstehen die Speicher. (Bild: Nidec Conversion)")
:quality(80)/p7i.vogel.de/wcms/e8/a8/e8a8a953c77af9bbf208cce6454139d4/0129427931v3.jpeg "Strategisch: EPC lizenziert eGaN-Technologie an Renesas (Bild: frei lizenziert)")
:quality(80)/p7i.vogel.de/wcms/61/85/6185c7a5619aba866e3b237690bea839/0129334467v3.jpeg "So soll die Fabrik im polnischen Wałbrzych aussehen. (Bild: Sungrow Power Supply Co., Ltd.)")
:quality(80)/p7i.vogel.de/wcms/c7/f6/c7f61d0437c7f8fca3c6ff947ba2ad62/0129322490v2.jpeg "AMD hat die zweite Generation der Kintex UltraScale+ Gen 2 FPGA-Familie vorgestellt, die mit PCIe Gen4 den 4K-AV-over-IP-Betrieb für 4K/8K-Medienanwendungen unterstützt. (Bild: AMD)")
:quality(80)/p7i.vogel.de/wcms/66/0c/660c31afa35398bac9be42f2be73fdc4/0129073529v2.jpeg "FPGAs lösen Performance-Engpässe, gelten aber in der Programmierung als schwer zugänglich. Die universelle Programmiersprache Livt soll die Hürde senken – korrekt, deterministisch und HDL-kompatibel. (Bild: Toby Giessen / VCG)")
:quality(80)/p7i.vogel.de/wcms/9c/35/9c35ed04fa562b190cbc496a695a6802/0128823288v1.jpeg "Optimiert auf Skalierung oder Geschwindigkeit: Die SGET hat den offenen Standard oHFM für FPGA-Module in zwei Varianten vorgestellt. (Bild: SGET (Screencast / Screenshot))")
:quality(80)/p7i.vogel.de/wcms/d7/e6/d7e6fe4124ec2efc726e9c3f2c2a4cfc/0128241940v2.jpeg "(Bild: frei lizenziert)")
:quality(80)/p7i.vogel.de/wcms/8f/bf/8fbf2cfa5f7238e41e046b12e936212b/0129541806v3.jpeg "Der Pistenbully 600 E+ ist eine hybride Pistenraupe, die nicht an die Steckdose muss. (Bild: Kässbohrer Geländefahrzeug AG)")
:quality(80)/p7i.vogel.de/wcms/fc/4f/fc4f36089dac773f0b9483eb39a726a1/0129508876v2.jpeg "Microsoft-Deutschlangzentrale in München: Im Rahmen der Münchner Sicherheitskonferenz haben 15 internationale Unternehmen entlang der gesamten Elektronik-Wertschöpfungskette unter Federführung von Microsoft und Ericsson eine Tech Allianz für digitale Souveränität und gemeinsame Vertrauensstarndards gebildet. (Bild: Microsoft)")
:quality(80)/p7i.vogel.de/wcms/bc/42/bc42dd0a04818f6195a7f78bcec88be6/0129484567v2.jpeg "Der oberirdische Teil des IceCube-Experiments und die grafische Simulation eines Messsignals der Detektoren im Eis. Die Forscher können mit dem IceCube-Observatorium kosmische Neutrinos messen. (Bild: Stephan Richter, IceCube; Fotomontage: Beatrix von Puttkamer)")
:quality(80)/p7i.vogel.de/wcms/14/63/14635e09eff181f7ab7a0f81ffa0daa3/0129407664v2.jpeg "Dank eines neuartigen Sensors lässt sich Wasserstoff auch in feuchten Umgebungen zuverlässig detektieren. (Bild: frei lizenziert)")
:quality(80)/p7i.vogel.de/wcms/ff/e4/ffe44f0dcf0fc0323926b1bc0a60d94f/0129386849v2.jpeg "Strukturwandel der API: Die Firma Phytec Messtechnik ist von einem traditionellen Testaufbau zu einer Architektur mit Web-Service-API gewechselt. (Bild: Göpel electronic)")
:quality(80)/p7i.vogel.de/wcms/a7/8c/a78c5f851db209abb1540909918fbf4a/0129260768v2.jpeg "Eine KI-basierte Code-Vervollständig ist in der LabVIEW+-Suite von Emerson möglich. Der Projektkontext wird analysiert und passende Programmierschritte vorgeschlagen. (Bild: Emerson)")
:quality(80)/p7i.vogel.de/wcms/38/1d/381de324bbe6d190a95169372a8ca02b/0129540692v2.jpeg "Komponenten von Infineon ermöglichen eine schnelle Datenverarbeitung und -Kommunikation sowie ein effizientes Energiemanagement in BMW's Neuer Klasse. (Bild: BMW)")
:quality(80)/p7i.vogel.de/wcms/87/4e/874eb8316b30d4b79793576f26c7dc62/0129542275v2.jpeg "10G TSN-Endpoint: Neuer IP-Core für Echtzeit-Ethernet bis 10 Gbit/s. (Bild: Fraunhofer IPMS)")
:quality(80)/p7i.vogel.de/wcms/62/1c/621cb1390951d6ac4029cd471edf956d/0129543495v2.jpeg "DBK EMS ist in Rülzheim beheimatet und sieht sich nicht als simpler Dienstleister, sondern als Mitdenker. (Bild: niko design / DBK)")
:quality(80)/p7i.vogel.de/wcms/2c/60/2c60940d2ebd2d45765085bc69488764/0129530286v2.jpeg "Der chinesische Chiphersteller Nexperia, der in Nimwegen den europäischen Standort hat, wurde vom Gericht in Amsterdam dazu verdonnert, weiterhin kontrolliert zu werden. Das schmeckt Peking nicht. Das Dumme: Die Chips sind für Europas Autohersteller bekanntlich sehr wichtig ... (Bild: Nexperia)")
:quality(80)/p7i.vogel.de/wcms/a6/a8/a6a880c57faa551baeca28d4178de438/0129419457v2.jpeg "China investiert stark in das heimische Halbleiter-Ökosystem. Wer daran teilhaben will, sollte vorher wissen, wo sich welcher Cluster befindet und welche Technologie er vorantreibt. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/69/1f/691f39ba12be3cad90eb88bdabc456a6/0127321404v2.jpeg "Das Kreativteam Christian Göller, GreatScott! und Christopher Becht (v. l. n. r.): erfolgreiches Creator-Marketing im B2B-Sektor (Bild: Würth Elektronik)")
:quality(80)/p7i.vogel.de/wcms/6a/cc/6acc4f803241cfe5b6d60560c0a2b4d9/0126684948v2.jpeg "In der Altersgruppe 25 bis 64 verfügen 34 Prozent der Deutschen über einen tertiären Abschluss im MINT-Bereich. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/ef/aa/efaae5a25fb0a4c55c434611033447af/0126532350v2.jpeg "Die jährliche Back-to-School-Aktion von Digikey mit Preisen für Studierende ist gestartet. (Bild: Digikey)")
Einchip-Linear-Encoder mit Hallsensoren Wegsensor mit dem Funktionsprinzip eines magnetischen Drehgebers
Jetzt gibt es einen Linear-Encoder, der das Wirkprinzip des magnetischen Drehgebers mit Hallsensoren auf die Wegerfassung anwendet. Dieser Chip integriert neben den Hallelementen auch die digitale Signalverarbeitung, sodass in Kombination mit einer weiteren Komponente der Sensorhersteller ein kontaktloses Messsystem aufbauen kann.
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/93300/93330/65.jpg "EBV_Vekt4c_Subline_3d.jpg ()")
Die Erfassung linearer Bewegungen kann sehr aufwändig und teuer sein. Je nach gewünschter Genauigkeit und zu essender Wegstrecke kommen verschiedene Messverfahren zum Einsatz. Im einfachsten Fall ist dies ein Schiebepotenziometer, der einen variablen Widerstandswert proportional zur Wegstrecke liefert. Inkrementale oder absolute Linearmaßstäben erreichen Genauigkeiten von kleiner 1 µm bei Längen von mehreren Metern.
In einfachen Anwendungen wie Niveauregler, Hubmagneten, Sitzverstellung, Bewegungssensoren oder kontaktlosen Schiebeschaltern, gilt es jedoch Wegstrecken von einigen Millimetern bis einigen 100 cm möglichst kosten-günstig und kontaktlos zu erfassen. Magnetische Drehgeber auf Basis von Hallsensoren sind für rotierende Bewegungen bereits seit langem erfolgreich im Einsatz.
Das Messprinzip eines magnetischen Drehgebers beruht auf der Magnetfeldmessung eines diametral magnetisierten zylindrischen Permanentmagneten, welcher senkrecht über dem IC angeordnet wird. Die vier Hallsensoren sind für die Erfassung rotierende Magnetfelder jeweils als Sensorpaare orthogonal zueinander angeordnet und liefern entsprechende elektrische Sinus- und Cosinussignale, aus denen der Drehwinkel des Permanentmagneten eindeutig ermittelt werden kann.
Vier Hallsensoren in einer Linie
Für die lineare Wegmessung sind jetzt beim neuen Baustein iC-ML die vier Hallsensoren in einer Linie angeordnet und für einen magnetischen Polabstand von 2,56 mm ausgelegt. Der Schaltkreis gestattet die Verwendung eines entsprechenden Magnetbandes beliebiger Länge und garantiert eine fehlertolerante Montage, die den Assemblierungsaufwand verringert.
Bild 1 (siehe Aufmacher) zeigt die Anordnung des iC-ML schematisch in Bezug zum Magnetband. Die X-Koordinate liegt in der Bewegungsrichtung des abwechselnd nord-/südmagnetisierten Bandes und parallel zur Chipoberfläche. Die gezeigten Sinus- und Cosinussignale sind die elektrische Aus gangsspannungen im analogen Betriebsmodus.
Der Nullpunkt des Magnetband-Koordinatensystems wird auf den Mittelpunkt eines beliebigen Nordpols festgelegt. Mechanisch ist dann die Längsverschiebung des iC-ML anhand der Entfernung xd definiert, die zwischen dem äußersten linken Hallsensor und dem Nullpunkt des Magnetbandes besteht.
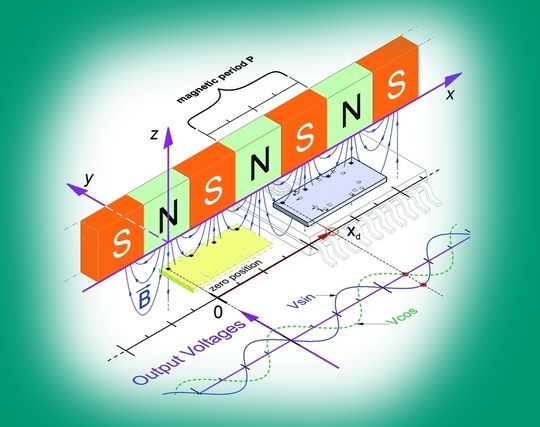
Bei Bewegung des Schaltkreises in X-Richtung ergibt sich der in Bild 1 gezeigte Signalverlauf an den Bausteinausgängen. Mit jeder Magnetperiode von 5,12 mm wird eine elektrische Signalperiode erzeugt. Innerhalb dieser Periode ist eine absolute Positionsbestimmung vorhanden.
Die Auswerteschaltung des Bausteins iC-ML beinhaltet den Hallsignalverstärker mit automatischer Verstärkungskontrolle, die Kompensation für Temperatur-, Magnetfeldstärke- und Versorgungsspannungsänderungen sowie einen A/D- und D/A-Wandler für digitalisierte und umgeformte analoge Ausgangssignale. Durch die differenzielle Magnetfeldauswertung ist die Schaltung auch unempfindlich gegen störende externe magnetische Gleichfelder. Der Abfall der Magnetfeldstärke unter eine verwertbare Grenze wird je nach Konfiguration des iC-ML als analoger Wert (GAIN) oder als digitales Signal (NERR) ausgegeben.
Programmierbare Betriebsarten
Die Signalverarbeitung des iC-ML unterstützt eine Auflösungsgenauigkeit von 20 µm bei einer Lineargeschwindigkeit bis zu 5 m/s. Zu den auf konstante Amplitude von 2 Vss geregelten Sinus- und Cosinussignalen stehen auch Digitalsignale in Form von Inkrementalimpulsen und ABZ-Quadratursignalen mit Auflösungen von 6 bzw. 7 und 8 Bit pro Magnetperiode zur Verfügung. Als weitere Option werden durch D/A-Rückwandlung hieraus periodische Signalformen wie Sägezahn-und Dreieckskurve generiert.
Die unterschiedlichen Betriebsarten lassen sich beim iC-ML über drei Eingänge mit Tri-State-Logik codieren. Die drei Zustände sind Low- und High-Pegel sowie der Vcc/2-Pegel, der sich bei einem offenen Eingang automatisch einstellt. Insgesamt sind 26 Betriebsarten mit den drei Eingängen wählbar. Die wichtigsten Betriebsarten sind: analoges Sinus- und Cosinussignal (einpolig oder differenziell), inkrementale A/B-Signale mit Nullimpuls, Zählimpulse für Up/Down-Binärzählung, analoges Sägezahn- oder Dreiecksignal mit einstellbarer Amplitude. Zusammen mit einem Magnetband als Maßverkörperung und dem iC-ML lässt sich ein komplettes Längenmesssystem herstellen.
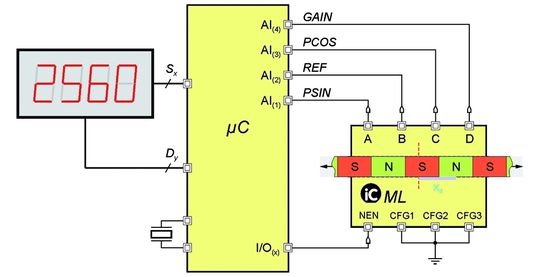
Bild 2 zeigt beispielhaft den Anschluss des Messsystems an einen Mikrocontroller. Hierbei ist der iC-ML als Linearsensor konfiguriert und gibt die zu Bild 1 äquivalenten Analogsignale (PSIN, PCOS) aus, die jeweils auf den Bezugswert REF zu referenzieren sind. Das Signal GAIN stellt ein Maß für die verfügbare Magnetfeldstärke dar und ist zur Fehlerdetektion (beispielsweise ein fehlendes Magnetband oder in zu großem Abstand angeordnetes Magnetband) nutzbar.
Drei Kaskadierungsmodi
Die Übernahme des beschalteten Betriebsmodus erfolgt mit der Aktivierung des iC-ML über einen Low-Pegel am NEN-Eingang durch den Mikrocontroller. Mit den auf Masse verdrahteten Pins CFG1, CFG2 und CFG3 werden die zunächst neutralen I/O-Ports A, B, C und D des iC-ML als Ausgänge mit den dargestellten Eigenschaften konfiguriert.
Die Erfassung der linearen Position auf mehreren Kanälen oder Achsen unterstützt der iC-ML durch drei Kaskadierungsmodi. Hierbei werden mehrere Bausteine per Daisy Chain miteinander verbunden. Der NENO-Ausgang der ersten Stufe wird mit dem NEN-Eingang der nachfolgenden Stufe verbunden. Beim Mikrocontroller sind für die Ansteuerung nur vier Signalports zu reservieren: ein Kanal für den Takt, einer für das Daisy Chain und zwei für Datenleitungen.
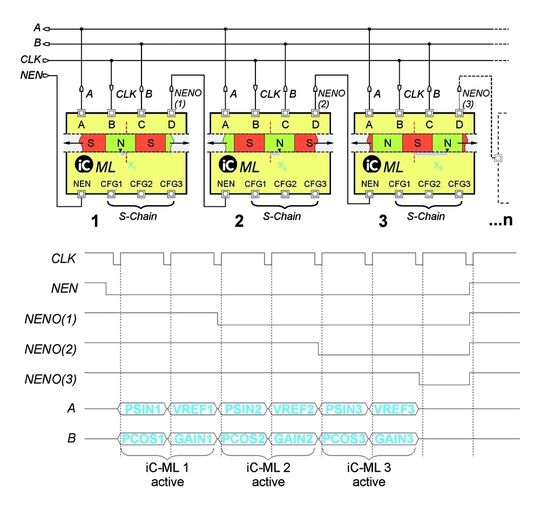
Bild 3 zeigt die Schaltungsanordnung und das Zeitdiagramm für Taktung und Freigabe von drei kaskadierten Bausteinen, die jeweils nacheinander über den NEN-Eingang von der vorhergehenden Stufe aktiviert werden.
Es sind keine weiteren Bauteile für die Kaskadierung nötig. Gilt es im System sowohl rotierende als auch lineare Bewegungen zu erfassen, lassen sich mit dem iC-ML und dem iC-MA (für rotierende Wegerfassung) auch gemischte Systeme kaskadieren.
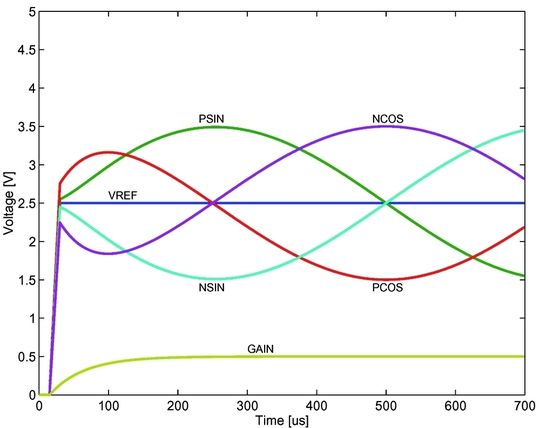
Bild 4 zeigt das Zeitdiagramm der Signale nach der Aktivierung eines iC-ML im Analogmodus durch den Mikrocontroller. Während der Ausgabe der Signale an den Busleitungen A und B erfasst der Mikrocomputer diese an den zwei getrennten Analogeingängen. In der gewählten Konfiguration sind dies im ers-ten Taktzyklus die PSIN- und PCOS-Signale, während im zweiten Takt das zugehörige Referenzsignal VREF sowie das GAIN-Signal zur Bewertung der Magnetfeldstärke ausgegeben wird.
Nach Aktivierung sind die Daten in jedem Taktzyklus nach typisch 150 µs stabil und geben das entsprechende elektrische Abbild der magnetischen Wegerfassung wider. Die Signalverläufe in Bild 4 zeigen die periodischen Analogsignale bei einer Verfahrgeschwindigkeit von 5,12 m/s (bei Verwendung eines Magnetbandes mit einer Magnetperiode von 5,12 bzw. 2,56 mm magnetischem Polabstand).
Fit für den rauen Einsatz
Je nach gewählter Betriebskonfiguration sind von den in Bild 4 dargestellten analogen Signalen jeweils PSIN, NSIN, PCOS, NCOS oder PSIN, NSIN, VREF, GAIN an vier Ausgangspins permanent (Einzelbaustein, Bild 2) bzw. zwei Busleitungen über zwei Takte verteilt (Daisy-Chain-Anordnung, Bild 3) verfügbar.
Die gezeigte Systemkonfigurationen mit einem Mikrocontroller nach Bild 2 oder erweitert nach Bild 3 kommen in einfachen Sensorsystemen zum Einsatz, um lineare Ausschläge zu messen, seien es nun Längenausdehnungen, Vibrationen/Schwingungen, Flüssigkeitsniveaus, Verdrehungen, Hubbewegungen oder Positionsdaten. Aufgrund der kontaktlosen und verschleißfreien Signalerfassung sind die darauf aufbauenden Anwendungen bestens gerüstet für eine raue und mit extremen Temperaturschwankungen behaftete Umgebung.
*Dr. David Lin ist verantwortlich für Vertrieb & Applikationen bei iC-Haus GmbH, Bodenheim.
Artikelfiles und Artikellinks
(ID:238093)
:quality(80)/p7i.vogel.de/wcms/c4/c0/c4c0de4fce72a4d7ec90b7af787d7ddb/0124484092v3.jpeg "Aktiver Tiefpassfilter mit Schaltung zur Verstärkungssteuerung. (Bild: Analog Devices)")
:quality(80)/p7i.vogel.de/wcms/b5/41/b541929da41a3e955347abbcb62858df/0123593875v2.jpeg "Bild 1: Der Referenzrahmen zur Beschleunigungsmessung ADIS16576. (Bild: ADI)")