:quality(80)/p7i.vogel.de/wcms/2f/bc/2fbc41c5140905b15698225ff58b203e/0129648135v2.jpeg "Das III-V-Germanium-PV-Modul mit einem Wirkungsgrad von 34,2 % ist das aktuell effizienteste Solarmodul der Welt. (Bild: Jacob Forster)")
:quality(80)/p7i.vogel.de/wcms/17/2c/172caa709bdbf17c495ef523f65663ad/0129630827v1.jpeg "Links: High Bandwith Flash (HBF) stapelt mehrere Schichten von NAND-Chips, um die Speicherkapazität deutlich zu erhöhen; Rechts: Konzept der in der IEEE-Studie vorgestellten „hybriden“ H³-Architektur. (Bild: Sandisk (links) / Sk hynix (rechts))")
:quality(80)/p7i.vogel.de/wcms/93/ee/93ee5e88736974a1259c7427fc92f019/0129633555v2.jpeg "Eine vom MIT entwickelte Chip-Verarbeitungsmethode könnte Kryptografieverfahren dabei unterstützen, Daten sicher zu halten, indem zwei Chips sich innerhalb desselben Systems gegenseitig anhand eines gemeinsamen Fingerabdrucks authentifizieren können. (Bild: frei lizenziert)")
:quality(80)/p7i.vogel.de/wcms/7e/5f/7e5f325ff1bfc6b00cf7bbbd51eb8f4f/0129653700v2.jpeg "Ein WBA-Report zeigt auf, warum KI und Machine Learning zur Grundlage moderner Wi-Fi-Netze werden, und plädiert für offene Standards entscheidend, um Fragmentierung zu vermeiden. (Bild: frei lizenziert)")
:quality(80)/p7i.vogel.de/wcms/72/6f/726f375d560ee89b1753e65402f2bf11/0129619600v2.jpeg "Erste Transistoren:
Nach dem zweiten Weltkrieg begann die Ära der Elektronik mit der Erfindung des Transistors. Das Bild zeigt den Bell-Transistor Nr. 9, der 1952 nach München kam (links), und den Siemens-Nachbau. (Bild: © Kristin Rinortner)")
:quality(80)/p7i.vogel.de/wcms/44/2c/442ca7930230eaeb8d27d0234a9ab8d3/0129693467v2.jpeg "Eine Karte mit Programmcode, wie sie in Unterrichtseinheiten für COBOL-Programmierung auf einem IBM System/360 Mainframe eingesetzt wurde. Die über 65 Jahre alte Programmiersprache COBOL ist vor allem bei Legacy-Anwendungen im Bank- und Versicherungswesen noch fest verankert, und deren Modernisierung aufwändig und teuer. Laut Anthropic lässt sich dieser Aufwand nun mit dem KI-Tool Claude Code leicht automatisieren. (Bild: frei lizenziert)")
:quality(80)/p7i.vogel.de/wcms/68/fe/68fe4eae41615d24a3485bf72dbdeb4a/0129696639v2.jpeg "Mini-STX K3921-N:
Das Motherboard meistert Intels Core-i3- und N-Series-Prozessoren und kann mehrere Monitore mit Full-HD anbinden. (Bild: Kontron)")
:quality(80)/p7i.vogel.de/wcms/e9/d0/e9d091b15c2c6045a84a9cefbc597180/0129694966v2.jpeg "Robonodes DVK-Entwicklungskit: Dieses ist über den Sample Shop von Codico erhältlich. (Bild: 8DEVICES)")
:quality(80)/p7i.vogel.de/wcms/30/1f/301fa3142221a2ee6ba3ef07e89a4ec8/0129690250v2.jpeg "Die Solid-State-Batterie wurde 2026 auf der CES in Las Vegas vorgestellt. (Bild: Donut Lab)")
:quality(80)/p7i.vogel.de/wcms/e1/2d/e12d843be72a9dc1cab04b68f1c39e4a/0129691802v3.jpeg "Aufbau einer Flüssigmetall-Batterie - Projekt Solstice. (Bild: HZDR / Blaurock)")
:quality(80)/p7i.vogel.de/wcms/8b/e8/8be874cadb88f7d40c58381cd26f0122/0129697493v3.jpeg "Universell: Motoren kommen überall zum Einsatz. (Bild: Microchip Technology)")
:quality(80)/p7i.vogel.de/wcms/c7/f6/c7f61d0437c7f8fca3c6ff947ba2ad62/0129322490v2.jpeg "AMD hat die zweite Generation der Kintex UltraScale+ Gen 2 FPGA-Familie vorgestellt, die mit PCIe Gen4 den 4K-AV-over-IP-Betrieb für 4K/8K-Medienanwendungen unterstützt. (Bild: AMD)")
:quality(80)/p7i.vogel.de/wcms/66/0c/660c31afa35398bac9be42f2be73fdc4/0129073529v2.jpeg "FPGAs lösen Performance-Engpässe, gelten aber in der Programmierung als schwer zugänglich. Die universelle Programmiersprache Livt soll die Hürde senken – korrekt, deterministisch und HDL-kompatibel. (Bild: Toby Giessen / VCG)")
:quality(80)/p7i.vogel.de/wcms/9c/35/9c35ed04fa562b190cbc496a695a6802/0128823288v1.jpeg "Optimiert auf Skalierung oder Geschwindigkeit: Die SGET hat den offenen Standard oHFM für FPGA-Module in zwei Varianten vorgestellt. (Bild: SGET (Screencast / Screenshot))")
:quality(80)/p7i.vogel.de/wcms/7b/70/7b700e93abd717e2feb5466810810af4/0127597143v2.jpeg "Shrike-lite: FPGA und ein Mikrocontroller für nur vier US-Dollar. (Bild: Vicharak)")
:quality(80)/p7i.vogel.de/wcms/92/fd/92fd7c3102fc8b710244ad109c079be6/0129551381v2.jpeg "Digitale Selbstbestimmung: Das neue Assessment-Tool von Red Hat hilft Unternehmen dabei, die volle Kontrolle über ihre IT-Infrastruktur zurückzugewinnen. (Bild: KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/17/9c/179c11641120399cf2e4cf0e5943b107/0129645476v2.jpeg "Auf der „embedded world 2026” präsentiert Rohde & Schwarz einen Auszug aus seinem Portfolio an Messtechnik und Testsystemen. (Bild: Rohde & Schwarz)")
:quality(80)/p7i.vogel.de/wcms/84/10/8410f7a52af344d1e5626d0610c9fa23/0129553240v2.jpeg "Joe Woodford ist als Group Director für Global Sales & Marketing bei Pickering Interfaces tätig. Seiner Meinung nach war das Jahr 2025 für das Unternehmen von „globaler Unsicherheit geprägt“, die er unter anderem auf die von US-Präsident Trump verhängten Zölle zurückführte.
(Bild: Pickering Interfaces)")
:quality(80)/p7i.vogel.de/wcms/bc/42/bc42dd0a04818f6195a7f78bcec88be6/0129484567v2.jpeg "Der oberirdische Teil des IceCube-Experiments und die grafische Simulation eines Messsignals der Detektoren im Eis. Die Forscher können mit dem IceCube-Observatorium kosmische Neutrinos messen. (Bild: Stephan Richter, IceCube; Fotomontage: Beatrix von Puttkamer)")
:quality(80)/p7i.vogel.de/wcms/14/63/14635e09eff181f7ab7a0f81ffa0daa3/0129407664v2.jpeg "Dank eines neuartigen Sensors lässt sich Wasserstoff auch in feuchten Umgebungen zuverlässig detektieren. (Bild: frei lizenziert)")
:quality(80)/p7i.vogel.de/wcms/d9/10/d91090b58a45f6c5e36af75ced88994d/0129691251v2.jpeg "Echtzeit-Datenerfassung: Mit 10 GSPS und integriertem FPGA beschleunigt der neue PCIe-Digitalisator anspruchsvolle ATE- und LiDAR-Systeme. (Bild: Teledyne)")
:quality(80)/p7i.vogel.de/wcms/b0/f1/b0f1ca4fc48eb0a6ec2fa1f77706cc53/0129503249v2.jpeg "Die CL1-Plattform von Cortical Labs ist in der Lage, komplexe Aufgaben innerhalb weniger Minuten zu erlernen. (Bild: Reply)")
:quality(80)/p7i.vogel.de/wcms/2e/2a/2e2a5297d427998ec3f2afeaa44a4576/0129577028v2.jpeg "Forscher haben einen biegsamen KI-Chip entwickelt, der vor allem für das Design von Wearables ausgelegt wurde (Symbolbild). (Bild: frei lizenziert)")
:quality(80)/p7i.vogel.de/wcms/f8/10/f810548470e6316cfdc8634912aec635/0129721304v2.jpeg "Merchandise: Wer sich die echte Twinscan nicht leisten kann oder will, kann die Lithographiemaschine bei ASML auch als Klemmbaustein-Modell erwerben. (Bild: ASML)")
:quality(80)/p7i.vogel.de/wcms/2d/fd/2dfd576c018fc2bf89aa2474061475fc/0129644484v2.jpeg "Übernahme komplett: Die finnische Incap hat die Übernahme des EMS-Fertigers Lacon abgeschlossen. (Bild: Gerd Altmann from Pixabay)")
:quality(80)/p7i.vogel.de/wcms/45/e2/45e2814c7d4a2d62f6cccb9136d224cc/0129644517v2.jpeg "Die Sieger des PCB Design Award 2024. (Bild: FED)")
:quality(80)/p7i.vogel.de/wcms/09/94/09945e4404ff6ce95338e7ff2960931f/0129704428v2.jpeg "Ulf Jepsen ist Geschäftsführer von Photocad. (Bild: Photocad)")
:quality(80)/p7i.vogel.de/wcms/bf/f0/bff03672e2ffee3feb07a46ff8d65ed4/0129692047v2.jpeg "Die Analysen zu den Exportzahlen der Branche im Jahr 2025 basieren auf Daten von Destatis sowie auf eigenen Daten des ZVEI. (Bild: ZVEI)")
:quality(80)/p7i.vogel.de/wcms/e5/6c/e56ceb935ba09cb66a4fd0f961b2d3e9/0129642888v2.jpeg "(Bild: Vogel Professional Education)")
:quality(80)/p7i.vogel.de/wcms/69/1f/691f39ba12be3cad90eb88bdabc456a6/0127321404v2.jpeg "Das Kreativteam Christian Göller, GreatScott! und Christopher Becht (v. l. n. r.): erfolgreiches Creator-Marketing im B2B-Sektor (Bild: Würth Elektronik)")
:quality(80)/p7i.vogel.de/wcms/6a/cc/6acc4f803241cfe5b6d60560c0a2b4d9/0126684948v2.jpeg "In der Altersgruppe 25 bis 64 verfügen 34 Prozent der Deutschen über einen tertiären Abschluss im MINT-Bereich. (Bild: Dall-E / KI-generiert)")
Die Maschinenrichtlinie 2006/42/EU, Teil 2 Überwachungsfunktionen im Komplettantrieb für Geschwindigkeit und Position
Wichtig in der Praxis sind Überwachungsfunktionen für Geschwindigkeit und Position. Und: Neben zahlreichen in der Maschinenrichtlinie 2006/42/EU gelisteten Sicherheitsfunktionen kann der Anwender auch selbst welche spezifizieren. Dabei muss der sichere Zustand eindeutig definiert sein.
Anbieter zum Thema
Wenn Sicherheitsfunktionen gleich im Antrieb integriert sind, wirkt sich das unmittelbar auf die Kosten einer Anlage oder Maschine aus. Die Sicherheitsfunktion Safe Torque Off (STO) ist häufig schon Standard. Weitere Funktionen sind Safe Operating Stop und Safe Stop. Für die Realisierung der sicheren Überwachungsfunktionen für Geschwindigkeit und Position müssen zusätzlich die erforderlichen Geber zur Erfassung berücksichtig werden.
Die eingesetzten Geber müssen den selben Sicherheitsintegritätslevel und/ oder Performance Level erfüllen wie die sichere Überwachungsfunktion selbst, da der Geber ein Teil der Sicherheitskette ist. Aus diesem Grund streben immer mehr Hersteller von Gebern die Zertifizierung ihrer Geber nach SIL 2 oder SIL 3 an.
Die EN 61800-5-2 listet eine Anzahl von sicheren Überwachungsfunktionen auf, für die es in der Industrie eine häufige Anwendung gibt. Die Liste der Norm ist nicht vollständig. Sicherheitsfunktionen, welche in der Industrie benötigt werden und hier nicht gelistet sind, können vom Anwender selbst spezifiziert werden. Wichtig für jede selbstspezifizierte Sicherheitsfunktion ist es, dass die Eigenschaften eindeutig beschrieben werden und der sichere Zustand bei Anforderung und im Fehlerfall eindeutig definiert ist.
Sicherheit beim Einrichten von Robotern
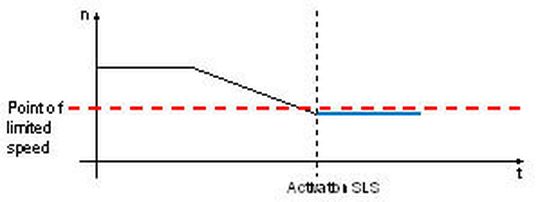
Eine häufig verwendete Sicherheitsfunktion in der Industrie ist die “Safely-limited speed” (SLS). Diese Sicherheitsfunktion wird häufig für den „Einrichtbetrieb“ bei Robotern verwendet. Die Eigenschaft dieser Sicherheitsfunktion ist die Überwachung der Geschwindigkeit hinsichtlich der Nichtüberschreitung einer spezifizierten oberen Grenze. Die Realisierung dieser Sicherheitsfunktion erfolgt in der Regel durch eine parametrierbare integrierte sichere Überwachungsfunktion in Kombination mit einen oder zwei sicheren Gebern zur Geschwindigkeitserfassung. Im Fehlerfall wird entweder die Sicherheitsfunktion SOS oder STO ausgeführt, um den sicheren Zustand herbeizuführen.
Weitere in der EN 61800-5-2 genannte verwendete Sicherheitsfunktionen sind unter anderem:
- SLP (Safely-limited position),
- SLI (Safely-limited increment),
- SDI (Safe direction),
- SBC (Safe brake control) und
- SSM (Safe speed monitoring).
Um die Konformität zur neuen Maschinenrichtlinie sicher zu stellen müssen neben dem Produktstandard auch die harmonisierten Standards für die Maschinensicherheit EN ISO 13849-1 und/ oder EN 62061 sowie EN 60204-1 und weitere in Abhängigkeit der Anwendung berücksichtigt werden. Neben der Benennung von Sicherheitsfunktionen werden in der EN 61800-5-2 auch Aspekte der systematischen Integrität z.B. die Anwendung von Maßnahmen zur Fehlervermeidung und Aspekte der Sicherheitsintegrität wie z. B. die Berücksichtigung von Maßnahmen zur Erkennung und Kontrollierung von gefährlichen Fehlern genannt.
Für die Erreichung der erforderlichen systematischen Integrität definiert die EN 61800-5-2 Anforderungen zum Management der Funktionalen Sicherheit, für die Beurteilung der Funktionalen Sicherheit sowie an die Dokumentation bezüglich aller Lebenszyklusphasen einer Produktentwicklung. Systematische Fehler, die während der Entwicklung übersehen werden, können die Konsequenzen von kostspieligen Änderungen sowie einer verspäteten Markteinführung nach sich ziehen. Daher ist eine detaillierte Dokumentation jeder Entwicklungsphase erforderlich, um eine Reproduzierbarkeit des Entwicklungsprozesses zu erreichen. Maßnahmen zur Vermeidung von Fehlern müssen während jeder Lebenszyklusphase angewendet werden. Die anzuwendenden Maßnahmen sind abhängig vom angestrebten Sicherheitsintegritätslevel.
Prooftest erkennt Ausfälle
Des Weiteren fordert die EN 61800-5-2 die Bestimmung der gefährlichen Versagensrate pro Stunde (PFH). Der erforderliche Wert für die PFH hängt wiederum vom angestrebten Sicherheitsintegritätslevel ab und muss für die gesamte Sicherheitsfunktion eingehalten werden. Aufgrund der Tatsache, dass die integrierte Sicherheitsfunktion im Antrieb nur ein Teil der Sicherheitskette darstellt, sollte der PFH Wert ausreichend kleiner sein als der durch Sicherheitsintegritätslevel definierte Wert.
Die PFH ist hauptsächlich abhängig von der gewählten Hardwarearchitektur, der abgeschätzten Ausfallrate, die Anfälligkeit bezüglich Fehler gemeinsamer Ursache sowie dem Diagnosedeckungsgrad der implementierten Tests zur Fehlererkennung. Auch das gewählte Intervall für den „Prooftest“, der unternommen werden muss, um Fehler zu erkennen, welche nicht durch die interne Diagnose erkannt werden, hat einen beträchtlichen Einfluss auf die PFH. Der Prooftest dient der Erkennung von Ausfällen, welche nicht durch die interne Diagnose erkannt werden. Diese Ausfälle gehen direkt in die PFH ein. Da die Durchführung eines Prooftests für prorgrammierbare elektronische Komponenten sich durchaus schwierig gestalten kann, wird empfohlen ein Prooftestinterval von 20 Jahren anzustreben, so dass innerhalb der Lebenszeit (Missiontime) des Produktes kein Prooftest erforderlich ist.
Ferner muss in Abhängigkeit der beabsichtigten Anwendung entsprechend EN 61800-5-2 die integrierte Sicherheitstechnik mit erhöhten EMV -rüfschärfegraden getestet werden. Für den Einsatz in Anwendungen die unter die Maschinenrichtlinie fallen müssen daher als Minimum die erhöhten Prüfschärfegrade entsprechend Annex E der EN 62061 angewendet werden.
*Dipl.-Ing. Thomas Steffens, Product Manager, Electro-sensitive protective equipment/Safety related Drive systems, TÜV Rheinland Industrie Service
(ID:336031)
:quality(80)/p7i.vogel.de/wcms/7f/e8/7fe847038b7d5a48dd79ec4e949ad1d4/0124896475v3.jpeg "Das eWheel ist ein hochintegriertes Antriebssystem bestehend aus
BLDC-Motor, Gebersystem, integrierter Bremse und Getrieberad und ist
optimal abgestimmt für den Einsatz in FTS (fahrerlose Transportsysteme) und AGVs (Automated Guided Vehicle). (Bild: b-drives, Montage: M. Christa)")
:quality(80)/p7i.vogel.de/wcms/aa/0a/aa0af626de8dc1da6d14e2a6a9e48f85/0126535846v2.jpeg "Cybersicherheit: Der Cyber Resilience Act (CRA) der Europäischen Union stellt neue Anforderungen bezüglich der Cybersicherheit an elektronische Geräte. (Bild: madartzgraphics)")