:quality(80)/p7i.vogel.de/wcms/e9/ce/e9ce137e87eccac328ec5504c586c477/0129711019v3.jpeg "Im Rahmen eines Entwicklungsprojekts wurden verschiedene bleireduzierte und bleifreie Kupfer-Beryllium-basierte Legierungskonzepte untersucht, die die Anforderungen an hohe Festigkeiten als auch eine hohe elektrische Leitfähigkeit erfüllen. (Bild: Materion)")
:quality(80)/p7i.vogel.de/wcms/68/46/684697b6eb687384e0d8c6803450401a/0130056395v2.jpeg "Das TUM RoboGym (powered by Neura) in der Planungsphase (Grafik). Die TU München und das Robotik Startup Neura Robotics planen, gemeinsam am Campus der TU München das weltgrößte Robotik-Trainingszentrum einzurichten. (Bild: Neura Robotics)")
:quality(80)/p7i.vogel.de/wcms/0f/c0/0fc0d93c99a5d9066e58c39f41fb1b10/0130046764v2.jpeg "Sicherheit im Schienenverkehr: Dank 5G-Funkverbindung wird eine stabile Übertragung unter schwankenden Netzbedingungen garantiert. (Bild: Smart Rail Connectivity Campus (SRCC))")
:quality(80)/p7i.vogel.de/wcms/fa/60/fa6016fc48ac8609a451038ca38b0eca/0130241261v2.jpeg "NVIDIAs GB300-KI-Chip mit HBM3E und HBM4 von SK Hynix. (Bild: SK Hynix)")
:quality(80)/p7i.vogel.de/wcms/57/97/5797ffe4c6e19cf02aa75a7f742598b3/0130160607v2.jpeg "Johann Wiesböck: Der technische Fortschritt wird nie enden. Jedenfalls nicht in der Elektronik und ihren Anwendungen. (Bild: VCG)")
:quality(80)/p7i.vogel.de/wcms/1d/d8/1dd8627e2323721d4ee5436f9401911e/0130147601v2.jpeg "Der kompakte Modulator ermöglicht eine schnelle und energieeffiziente Datenübertragung und lässt sich kostengünstig herstellen. (Bild: Hugo Larocque, EPFL)")
:quality(80)/p7i.vogel.de/wcms/fb/d3/fbd33264fcdf128866667be0a0a6b657/0130137877v2.jpeg "Openclaw begeistert KI-Communitys. (Bild: Openclaw.ai)")
:quality(80)/p7i.vogel.de/wcms/a5/5e/a55ec741a9c17cb890b2cb5bcb919477/0130162776v2.jpeg "Von der vernetzten Kamera über den Saugroboter und den Industrieroboter bis hin zu Drohne und Humanoiden wandert KI entlang der Entwicklung von „Basic Intelligence“ zur „Multi-Purpose Intelligence“ immer näher an Sensoren und Aktoren, während softwaredefinierte Architekturen langfristige Systeme flexibel für neue Funktionen und KI-Modelle aufrüstbar machen. (Bild: Globalfoundries)")
:quality(80)/p7i.vogel.de/wcms/fa/8d/fa8dedee195f29c33c89d86311c258ee/0130104146v2.jpeg "Kompakte KI-Power: Die Smart-Module SIM8668 und SIM8666 von Simcom vereinen auf kleinstem Raum eine Quad-Core-CPU samt integrierter NPU für ressourcenschonende Industrie- und Robotikanwendungen. (Bild: Chip: Simcom/Hintergrund: KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/cc/13/cc1378375499a26b5ddbb309d2155acb/0130085649v2.jpeg "Vom Hardware-Produzenten zum Software-Anbieter: Neocortec lizenziert seinen NeoMesh-Protokoll-Stack zunehmend direkt an OEMs und Dritthersteller, anstatt ausschließlich auf den Verkauf eigener Funkmodule zu setzen. (Bild: mc/VCG)")
:quality(80)/p7i.vogel.de/wcms/24/58/2458f1cae3100e375fbb8124f02c54af/0130111244v3.jpeg "Stromsparer für das IoT: Der Npzero-Baustein übernimmt die Sensorüberwachung und schickt den Hauptprozessor in den Tiefschlaf. (Bild: Manuel Christa)")
:quality(80)/p7i.vogel.de/wcms/6d/f0/6df06a1488ceb6357c287fee993fad65/0130161592v3.jpeg "Die weltweit erste voll funktionsfähige Quantenbatterie als Proof-of-Concept, entwickelt von CSIRO und seinen Kooperationspartnern, der University of Melbourne und dem RMIT. (Bild: CSIRO and collaborators, The University of Melbourne and RMIT)")
:quality(80)/p7i.vogel.de/wcms/65/f4/65f404dc6d19d4f1628ad7e49f6a22cf/0130136276v2.jpeg "Bild 1: Blockschaltbild eines E-Bike-Systems auf Basis des Gate-Treibers DRV8363-Q1. (Bild: TI)")
:quality(80)/p7i.vogel.de/wcms/fa/fc/fafc300481de3fd4d7f34400327d0d01/0130127049v2.jpeg "Lenovo hat in Zusammenarbeit mit der Shanghai Jiao Tong University eine Silizium-Anoden-Batterie unter dem Namen „ED1000\" als Proof of Concept für mobile Workstations vorgestellt. (Bild: Lenovo)")
:quality(80)/p7i.vogel.de/wcms/10/45/1045969e69a1db4aaa73d0f74f55cc02/0129962687v2.jpeg "Bosch Rexroth und AMD arbeiten gemeinsam an Software-Defined Automation: ctrlX OS unterstützt nun auch auf AMD Embedded x86-CPUs und adaptive SoCs und verspricht so noch größere Hardware-DesignFlexibilität, nahtlose Skalierbarkeit und eine sichere, modulare Betriebssystem-Grundlage. (Bild: Bosch Rexroth AG)")
:quality(80)/p7i.vogel.de/wcms/cd/32/cd3243e4a9a6476265ef6ea9463dfbd8/0129852659v2.jpeg "Die PIC64-Serie an Multicore-Mikroprozessoren setzt auf RISC-V-Kerne und eignen sich speziell für Anwendungen mit asynchronem Multipricessing (AMP) in intelligenten Embedded-Edge-Anwendungen. (Bild: Microchip)")
:quality(80)/p7i.vogel.de/wcms/c7/f6/c7f61d0437c7f8fca3c6ff947ba2ad62/0129322490v2.jpeg "AMD hat die zweite Generation der Kintex UltraScale+ Gen 2 FPGA-Familie vorgestellt, die mit PCIe Gen4 den 4K-AV-over-IP-Betrieb für 4K/8K-Medienanwendungen unterstützt. (Bild: AMD)")
:quality(80)/p7i.vogel.de/wcms/66/0c/660c31afa35398bac9be42f2be73fdc4/0129073529v2.jpeg "FPGAs lösen Performance-Engpässe, gelten aber in der Programmierung als schwer zugänglich. Die universelle Programmiersprache Livt soll die Hürde senken – korrekt, deterministisch und HDL-kompatibel. (Bild: Toby Giessen / VCG)")
:quality(80)/p7i.vogel.de/wcms/35/af/35af7dd326d198475d06fbb69aa600b5/0130175971v2.jpeg "Diff GT kann in einer kostenlosen Probeversion ausprobiert werden. (Bild: CSci)")
:quality(80)/p7i.vogel.de/wcms/c0/2e/c02e7bf72bfc434888c37100e2511681/0130127767v3.jpeg "„Wegen seiner kompakten Bauweise, des modularen Aufbaus und der hohen Effizienz ist der Axialflussmotor eine attraktive Alternative zur etablierten Radialflussmotor-Topologie“, PEM-Leiter Professor Achim Kampker (Bild: RWTH Aachen University)")
:quality(80)/p7i.vogel.de/wcms/95/a1/95a197490145b7afcfd4dc176a1b5ef9/0130096114v2.jpeg "Der Einsatz amorpher Stähle im Stator ermöglicht eine deutliche Reduktion von Verlusten und steigert die Effizienz moderner Elektromotoren im Fahrzeugantrieb. (Bild: Horse Powertrain)")
:quality(80)/p7i.vogel.de/wcms/ef/a0/efa0d8af7bcf1d64636b877a04b853d9/0130136738v2.jpeg "Nigel unterstützt Ingenieure und Entwickler bei ihrer täglichen Arbeit. (Bild: Emerson NI)")
:quality(80)/p7i.vogel.de/wcms/bf/82/bf82f81061b759c454e15ec4c2e7560b/0130110139v2.jpeg "48 Volt im Fahrzeug: Ziel ist eine effiziente Energienutzung, einfache Integration sowie eine zuverlässige Leistung. Doch mit den Möglichkeiten kommen auch Probleme. (Bild: Leoni)")
:quality(80)/p7i.vogel.de/wcms/74/96/74964a7715c738a9e8b17681445ceed3/0130103633v2.jpeg "Zusammen mit dem Vektor-Netzwerkanalysator PNA/PNA-X kann der Lightwave Component Analyzer N4378A von Keysight optische Transceiver-Komponenten mit 1,6 T und darüber hinaus charakterisieren. (Bild: Keysight)")
:quality(80)/p7i.vogel.de/wcms/0d/18/0d183ecb569b03285578762658d2def6/0130061201v2.jpeg "Rahman Jamal war 30 Jahre bei National Instruments und damit ein Teil der Messtechnik-Branche. Den VIP-Anwenderkongress hat er mit aus der Taufe gehoben. (Bild: ELEKTRONIKPRAXIS/privat)")
:quality(80)/p7i.vogel.de/wcms/f1/58/f158a1c680219c67cff9c099186ab50d/siemens-20ubtech-20hmnd-1920x1079v1.png "Bereit für die Fabrikhalle: Während Ubtech die Massenproduktion plant, testet Siemens bereits Humanoiden im realen Werkseinsatz in Erlangen. (Bild: Siemens)")
:quality(80)/p7i.vogel.de/wcms/6a/93/6a93991941467231d8798c8577882dfd/0130071573v2.jpeg "(Bild: Vision & Control GmbH)")
:quality(80)/p7i.vogel.de/wcms/19/31/193191c71275b1f480fff0e5827be766/0130211045v2.jpeg "Das Imec hat bekannt gegeben, dass mit der ASML EXE:5200 das weltweit fortschrittlichste EUV-Lithografiesystem mit hoher numerischer Apertur (High NA) in seinem 300-mm-Reinraum in Leuven eingetroffen ist. (Bild: Imec)")
:quality(80)/p7i.vogel.de/wcms/d1/d1/d1d103805ed7ac0df7feda4c46522b8c/0130164847v2.jpeg "Während das Mikrospritzgießen bei kritischen Bauteilen 10 bis 12 Wochen dauert, bietet der 3D-Druck eine schnellere Fertigung und größere Flexibilität bei Designiterationen, so Collins. (Bild: Boston Micro Fabrication)")
:quality(80)/p7i.vogel.de/wcms/68/7e/687ebf75f8024edeec7ebd6d3582327f/0130240314v2.jpeg "MRS Electronic arbeitet an Elektronik- und Softwarelösungen für die Steuerung, Kommunikation und Vernetzung moderner Fahrzeuge. (Bild: Würth Elektronik)")
:quality(80)/p7i.vogel.de/wcms/bb/2a/bb2ac8404ae7b3f08a5c01d1ca0615a7/0130182922v2.jpeg "Steht ein Verkauf von Elmos im Raum? Medienberichten zufolge planen die Gründer des Unternehmens, die weiterhin mehrheitlich Anteile am Dortmunder Automotive-Spezialisten halten, den Ausstieg aus dem Chipunternehmen. (Bild: Elmos)")
:quality(80)/p7i.vogel.de/wcms/d6/ea/d6eac438c362c545cab42ef0f30bcfc0/0130136975v2.jpeg "Die Bewerbungsphase für den James Dyson Award 2026 ist gestartet. (Bild: Dyson)")
:quality(80)/p7i.vogel.de/wcms/e5/6c/e56ceb935ba09cb66a4fd0f961b2d3e9/0129642888v2.jpeg "(Bild: Vogel Professional Education)")
:quality(80)/p7i.vogel.de/wcms/69/1f/691f39ba12be3cad90eb88bdabc456a6/0127321404v2.jpeg "Das Kreativteam Christian Göller, GreatScott! und Christopher Becht (v. l. n. r.): erfolgreiches Creator-Marketing im B2B-Sektor (Bild: Würth Elektronik)")
Grafisches Systemdesign Entwicklungszeiten von Echtzeit- und Embedded-Systemen verkürzen
Die Programmcode-Zeilen steigen mit zunehmender Komplexität und somit Entwicklungsaufwand und -kosten. Eine praktikable Lösung bieten grafische Entwicklungswerkzeuge. Dieser Artikel behandelt gängige fachspezifische Entwicklungsmethoden und Möglichkeiten, die Implementierung von Embedded-Systemen zu vereinfachen.
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/130400/130457/65.jpg "mev_logo-RGB-L.jpg ()")
:fill(fff,0)/p7i.vogel.de/companies/65/f1/65f186172d9f0/syslogic-logotype-alt-navy-mint.jpeg "syslogic-logotype-alt-navy-mint (Syslogic.ai)")
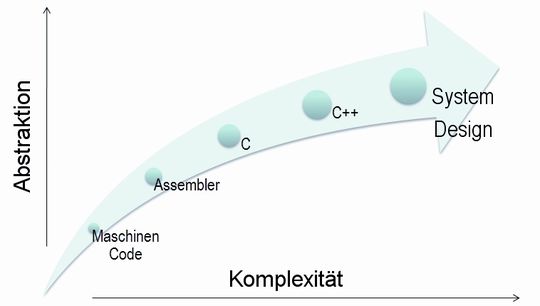
C ist zwar nach wie vor die meistgewählte Programmiersprache für Embedded-Systeme. Seit ihrer Einführung ist die Komplexität von Embedded-Systemen jedoch kontinuierlich angestiegen. Mit steigender Komplexität von Systemen werden daher Plattformen für das Design auf Systemebene immer wichtiger (Bild 1). Nur damit lassen sich in der Zukunft umfangreiche Anwendungen in einem realistischen Zeitrahmen bewältigen. Im Folgenden werden mehrere Methoden des Systemdesigns mit verschiedenen Arten der grafischen Programmierung und ihren jeweiligen Stärken und Schwächen erläutert.
Den Datenfluss grafisch programmieren
Das Datenflussprinzip ist eine Softwarearchitektur, die auf dem Konzept basiert, dass die Änderung eines Variablenwerts auch zu Abweichungen bei anderen, davon abhängigen Variablen führen sollte. Das bekannteste Beispiel dafür sind etwa abellenkalkulationsprogramme, in denen die Änderung eines Wertes in einer einzigen Zelle den Wert in einer anderen, damit zusammenhängenden Zelle beeinflussen kann, der dann wiederum eine andere Zelle ändert usw. Die grafische Darstellung des Datenflusses wird aus Architekturdiagrammen wie etwa Fluss- oder Prozessdiagrammen ersichtlich.
Für Embedded-Systeme wurden verschiedene Computerprogrammiersprachen zur Darstellung des Datenflussparadigmas entwickelt. Der größte Vorteil dieses Modells besteht darin, dass es parallele Vorgänge deutlich und ohne die Komplexität des Threading zeigt. Textbasierte Datenflusssprachen wie VHDL und Verilog wurden vor allem dazu verwendet, die Implementierung von FPGAs und ASICs zu beschreiben, wo parallele Operationen an der Tagesordnung sind.
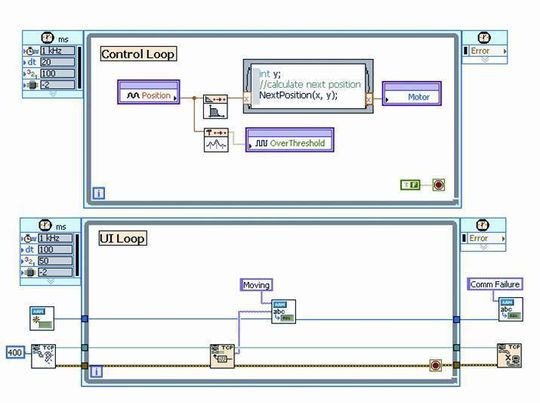
Grafische Programmiersprachen wie Ptolemy oder NI LabVIEW ermöglichen es Programmierern, ihr Datenflussprogramm mit Blöcken und Drähten bzw. Pfeilen darzustellen, mit denen die Zusammenhänge zwischen einzelnen Komponenten ausgedrückt werden. Bei der in LabVIEW genutzten Programmiersprache, auch bekannt als G, wird die Ausführung von der Struktur eines grafischen Blockdiagramms (Bild 2) festgelegt, auf dem der Programmierer die verschiedenen Funktionsknoten durch das Ziehen von Drähten verbindet. Diese leiten Variablen weiter und dieser Fluss wird dadurch gesteuert, dass jeder Knoten erst dann ausgeführt wird, wenn alle seine Eingangsdaten vorliegen.
Komplexe Abläufe mit einem State-Diagramm beschreiben
Ein State Diagram (Zustandsdiagramm) ist eine Darstellung des Verhaltens eines Systems, das eine endliche Anzahl von Zuständen umfasst. Es gibt verschiedene Arten von State Diagrams, die sich etwas voneinander unterscheiden und eine unterschiedliche Semantik aufweisen. Statecharts wurden von David Harel am Weizmann Institute of Science erfunden, um „konventionelle State-Transition Diagrams (Zustandsübergangsdiagramme) um … die Konzepte der Hierarchie, Parallelität und Kommunikation zu erweitern“. In den 1990ern wurden die Statecharts in die Spezifikation der Unified Modeling Language übernommen. Dort sind sie als Behavior Diagram (Verhaltensdiagramm) bekannt.
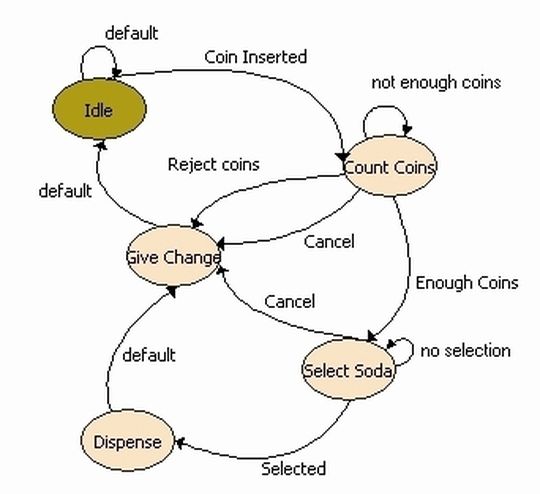
Um Statecharts zu verstehen, sieht man sich am besten zuerst ein klassisches State-Diagramm an und ergänzt dann Hierarchie, Parallelität und Ereignisse. Das klassische State-Diagramm besteht hauptsächlich aus zwei Konstrukten: Zuständen und Übergängen. Das nachfolgende State-Diagramm (Bild 3) illustriert beispielsweise die Funktionsweise eines einfachen Getränkeautomaten mit fünf Zuständen und sieben Übergängen. Die Maschine beginnt im Zustand „Leerlauf“ und geht in den Zustand „Münzen zählen“ über, wenn diese eingeworfen werden. Das Diagramm zeigt weitere Zustände und Übergänge, beispielsweise wenn die Maschine auf die Getränkeauswahl wartet, ein Getränk oder Wechselgeld ausgibt.
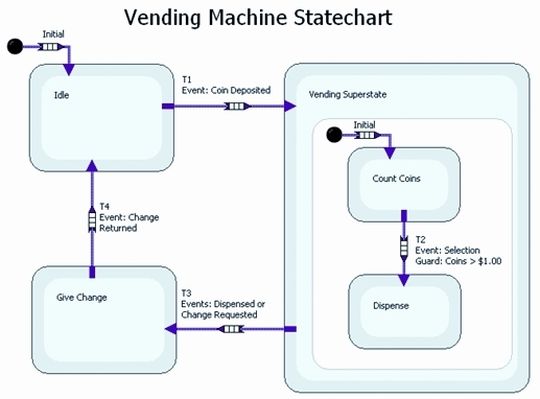
Ein Statechart (Bild 4), welches das Verhalten derselben Maschine beschreibt, besitzt weniger Zustände und Übergänge. Die Zustände „Münzen zählen“ und „Ausgeben“ können in einem übergeordneten Zustand zusammengefasst werden. So muss von diesen beiden Zuständen nur ein Übergang (T3) zum Zustand „Wechselgeld ausgeben“ definiert werden. Der Übergang T3 kann so konfiguriert werden, dass er auf drei Ereignisse reagiert: Getränk ausgegeben, Wechselgeld angefordert oder Münzen abgelehnt. Darüber hinaus kann der Zustand „Getränk auswählen“ im klassischen State Diagram wegfallen, wenn Übergang T2 mit einer Bedingung belegt wird. Diese muss erfüllt werden, damit der Übergang stattfindet. Wird die Bedingung nicht erfüllt, wird das Ereignis ignoriert und der Übergang findet nicht statt.
Da die meisten Embedded-Systeme als eine Art der Zustandsmaschine implementiert werden, bieten Statecharts eine bequeme Methode, um die High-Level-Architektur eines Systems darzustellen. Jedoch reichen Statecharts alleine meist nicht für die vollständige Implementierung eines Embedded-Systems aus, da jeder Zustand und jeder Übergang in einer anderen Form (Datenfluss, Imperativ) implementiert werden muss.
Dynamische Systeme simulieren
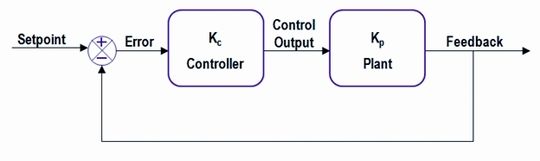
Ein dynamisches Systemmodell ist eine mathematische Darstellung der Dynamik zwischen Eingängen und Ausgängen eines dynamischen Systems. Die meisten Modelle dynamischer Systeme werden mit Differenzialgleichungen sichtbar gemacht, die aus physikalischen Gesetzen oder experimentellen Daten abgeleitet werden.
Viele Embedded-Systeme kommen in Regelschleifenanwendungen zum Einsatz, in denen die Ausgänge eines Systems von einer Reihe von Eingängen abhängen, darunter ein Referenz- oder Sollwert sowie ein Istzustand. Ein einfaches Beispiel für ein solches Regelsystem ist ein Heizungsthermostat. Der Sollwert liegt beispielsweise bei 21 °C. Liegt die aktuelle Zimmertemperatur bei 18 °C, sendet das Thermostat ein Signal an die Heizung, die sich dann einschaltet und den Raum heizt. Erreicht die Temperatur 21 °C, geht ein weiteres Signal vom Thermostat an die Heizung, die sich dann wieder ausschaltet.
Werkzeuge zur Simulation dynamischer Systeme werden von verschiedenen Herstellern angeboten. Die meisten Tools sind in der Lage, Programmcode zu erzeugen, der auf Embedded-Systemen ausgeführt werden kann. Diese Werkzeuge eignen sich besonders für Anwendungen, die komplexe Steuer- und Regelalgorithmen erfordern, sind aber bei der Implementierung universeller Programmieraufgaben recht schwerfällig.
Ideale Systemdesignplattform integriert verschiedene Modelle
Jedes dieser grafischen Designmodelle hat andere Stärken und/oder Schwächen, abhängig vom jeweiligen Anwendungsbereich. Eine ideale Systemdesignplattform ermöglicht Anwendern, sich frei zwischen den verschiedenen Modellen zu bewegen und sie sogar in eine einzige Darstellung zu integrieren.
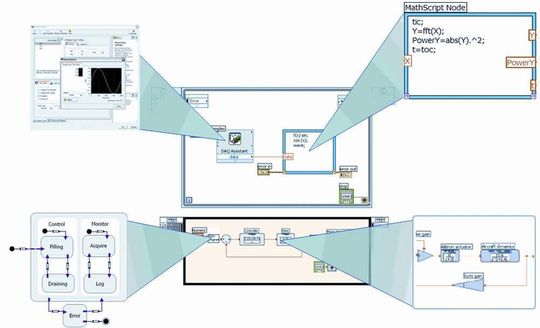
Darüber hinaus sollte eine brauchbare Systemdesignplattform nicht nur grafische Programmiermethoden, sondern auch textbasierte Programmiermodelle zulassen. So könnte ein Programmierer einen Signalverarbeitungsalgorithmus als Datenfluss, eine Transfergleichung als Text, einen Motorsteuerungsalgorithmus als Simulation und den gesamten Systemablauf als Statechart darstellen (Bild 6).
Steigende Komplexität erfordert wachsende Abstraktion bei der Softwareentwicklung von Embedded-Systemen. Dabei unterstützen Systemdesignplattformen wie LabVIEW den Embedded-Entwickler durch die Integration vielfältiger Abstraktionstechniken ohne den Zugriff auf maschinennahe Funktionen einzuschränken. Erst dieser heterogene Ansatz ermöglicht effiziente Applikationen bei höchstmöglicher Abstraktion. Die Beschreibung von Parallelität, Threading und Timing werden angesichts des aktuellen Trends zu heterogenen Multicore-Prozessoren in Embedded-Systemen immer wichtigere Themen, die einen Einfluss auf Qualität und Leistung von Embedded-Software ausüben. So können die grafischen Datenflussprogrammiersprachen helfen, die Brücke von traditionellen Programmierkonzepten hin zu den neuen Rechenplattformen für die nächsten zehn Jahre und darüber hinaus zu schlagen.
Weiterführende Literatur:
Luciano Lavagno, Alberto Sangiovanni-vincentelli, Models of Computation for Embedded System Design (1998).
http://www-cad.eecs.berkeley.edu/Respep/Research/asves/paper1998/Luciano_asi98.ps
David Harel, Statecharts: A Visual Formalism for Complex Systems, Department of Applied Mathematics, The Weizmann Institute of Science, 1986.
Barr, Michael. „Introduction to Closed Loop Control,“ Embedded Systems Design, August 2002.
Entwicklung von Embedded Systemen, http://www.ni.com/embedded/d/
(ID:280617)
:quality(80)/p7i.vogel.de/wcms/92/43/9243cfe82b7ab3448679ded83cb50204/0129762425v2.jpeg "PLS‘ UDE 2026 ermöglicht jetzt auch das Debuggen hocheffizienter embedded KI-Beschleuniger. (Bild: PLS)")
:quality(80)/p7i.vogel.de/wcms/f6/46/f646764da19bfca9202be9aaaf00bd0f/0125367814v2.jpeg "Der Zustand von stationären Batterien lässt sich mit der Innenwiderstandsmessung ermitteln. (Bild: Elektronik Kontor Messtechnik)")