
:quality(80)/p7i.vogel.de/wcms/3f/5f/3f5f3a0588397d2a70b6ec1345e7035c/0131917355v1.jpeg "Bild links: vertikale 3D-FeFET-Speicherstruktur mit gestapelten Zell-/Wortleitungsbereichen der neuartigen Transistoren. Bild rechts: REM-Nahaufnahme einer nanoskaligen ferroelektrischen Speicherzelle oder Kondensatorstruktur. Die vom Imec vorgestellten verbesserten FeRAM-Technologien sollen niedrigere Betriebsspannungen durch optimierte ferroelektrische Schichten und höhere Speicherdichte durch vertikale 3D-Integration ermöglichen. (Bild: Imec)")
:quality(80)/p7i.vogel.de/wcms/0b/99/0b9903e11b1cd8e5cdc52384d9177532/0131857635v2.jpeg "Dr. Alexander Noack steht neben dem QRNG-R19-Demonstrator. Dieser Quanten-Zufallszahlengenerator gewinnt echte Zufälligkeit aus Quanten-Vakuumfluktuationen. Auf Basis von intrinsisch zufälligen und unbeeinflussbaren Quanteneffekten werden echte Zufallszahlen mit Bitraten von 4 GBit/s erzeugt. (Bild: Fraunhofer IPMS)")
:quality(80)/p7i.vogel.de/wcms/fc/bc/fcbcbfa8f7881b7e4069ae1d2b0f11be/0131758679v2.jpeg "Energie sparen, schneller rechnen und Daten dauerhaft sichern: Die von Fraunhofer IPMS entwickelte und nach industriellen Prozessen von Globalfoundries gefertigte FRAM-Speichertechnologie soll genau diese Anforderungen erfüllen. (Bild: Fraunhofer / Piotr Banczerowski)")
:quality(80)/p7i.vogel.de/wcms/a5/df/a5dfa5148af04ae072dfbf628009ef89/0131873657v3.jpeg "(Bild: Imec)")
:quality(80)/p7i.vogel.de/wcms/f0/1b/f01bf534ae26f5c6af66cbf13235b87a/0131857321v2.jpeg "AMD hat das in Kalifornien ansässige Startup Mext übernommen. Das von dem Unternehmen entwickelte Speicher-Tiering soll selten genutzte Daten auf NAND-Flash auslagern und so den DRAM-Bedarf in Rechenzentren entlasten. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/9a/3b/9a3bc2a33bb665879e03b0f66eb5efb4/0131913830v2.jpeg "Renesas hat Pictorus übernommen, um die Software-Entwicklung für eingebettete Anwendungen innerhalb der Renesas-365-Plattform zu vereinfachen und zu beschleunigen. Angaben zum Kaufpreis wurden in den vorliegenden Informationen nicht genannt. (Bild: Reneas)")
:quality(80)/p7i.vogel.de/wcms/7f/d4/7fd4df861429341a7bcafc51efedc9df/0131883654v2.jpeg "Digitale Souveränität: Deutschland und Frankreich wollen künftig gemeinsam stärker auf eigene Infrastrukturen, offene Technologien und besser geschützte Datenräume setzen. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/d9/d2/d9d2a4a29f3b12683dff26c973b43027/0131836310v2.jpeg "Quantencomputer Libra: Das fehlerkorrigierte System von Quera soll ab 2028 über Amazon Braket für komplexe kommerzielle Anwendungen verfügbar sein. (Bild: Quera)")
:quality(80)/p7i.vogel.de/wcms/b9/6e/b96ee6275755ba3bae8951d67f0f68dc/0131930816v2.jpeg "Autonome mobile Robotikanwendungen: rasch erstellt mit Hilfe der Robotik-Referenzplattform von Arrow und STMicroelectronics. (Bild: Arrow ST)")
:quality(80)/p7i.vogel.de/wcms/88/34/8834f588cc03ac19278bf2c60cb0f467/0131907985v2.jpeg "Systemübergreifende Kontextintegration: KI-Agenten führen isolierte Daten aus ALM-, PLM- und ERP-Systemen zu fundierten Entscheidungsvorlagen zusammen. (Bild: PTC)")
:quality(80)/p7i.vogel.de/wcms/03/14/031429a9de0cf9efcfbcd477e8b2ef02/0131907760v2.jpeg "Das Münchner Landgericht hat in zwei weiteren Patentrechtsklagen gegen das chinesische Unternehmen Innoscience zugunsten von Infineon entschieden. Doch in China befand der oberste Gerichtshof, dass hingegen Infineon ein Patent des chinesischen Konkurrenten verletzt haben soll. (Bild: frei lizenziert)")
:quality(80)/p7i.vogel.de/wcms/fc/8a/fc8abb4d63749d997f748520bbb69c2f/0131809996v2.jpeg "Dimensionen im Fokus: Eine vollständige Wheatstone-Brückenschaltung auf einer Fingerkuppe verdeutlicht den hohen Grad der Miniaturisierung der Sensortechnologie von Digid. (Bild: Digid)")
:quality(80)/p7i.vogel.de/wcms/1e/7a/1e7a37663aad5ee011b0f766d44e8ed9/0131765852v2.jpeg "Stromversorgungslösungen für Rechenzentren boomen, entsprechend gefragt sind SiC-Anwendungen. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/14/d7/14d7cb77132e76f852e71edf06cc94fb/0131803730v2.jpeg "Tom Trill, CEO von Qualinx, und Dr. Manfred Horstmann, Senior Vice President und General Manager bei GlobalFoundries (Bild: Globalfoundries)")
:quality(80)/p7i.vogel.de/wcms/5b/75/5b758a6d983e2380da34de7bd474d422/0131438570v2.jpeg "AMD Zynq Ultrascale+ MPSoC ZCU102 Evaluierungskit: Ob als fertiges System oder zur Vorevaluierung, die Implementierung eines RISC-V-Softcores auf einem FPGA kann sich mituner schwieriger gestalten als gedacht. (Bild: AMD)")
:quality(80)/p7i.vogel.de/wcms/2e/78/2e789ef76c84f5fcdf02b5697a22f9ab/0131062677v2.jpeg "Zur Stärkung des Portfolios insbesondere mit Blick auf Edge-Cloud-Infrastruktur für KI-Lösungen übernimmt Low-Power-FPGA-Spezialist Lattice Semiconductor den Firmware- und Cloud-Software-Entwickler AMI. (Bild: Lattice)")
:quality(80)/p7i.vogel.de/wcms/d4/1d/d41d81ec84a42b4fd5d732d36d0021ce/0130877962v2.jpeg "Im Element:
Auch fast 40 Jahre, nachdem sich der Elektrotechnik-Ingenieur als Berater für ASIC- und FPGA-Entwicklung selbstständig machte, hält Eugen Krassin immer noch Schulungen und Seminare zur programmierbaren Logik. (Bild: Toby Giessen)")
:quality(80)/p7i.vogel.de/wcms/0f/c4/0fc4f1c68ab438a1b827685f52aac47b/0131898344v2.jpeg "Die Electronica 2026 zeigt Technologien für resiliente Elektronik. (Bild: Messe München GmbH)")
:quality(80)/p7i.vogel.de/wcms/e8/42/e842dfba0064a29978935733ebc89eb0/0131831278v2.jpeg "Während Desktop-Systeme heute standardmäßig mit Exploit-Mitigation-Mechanismen abgesichert sind, fehlen vergleichbare Schutzmaßnahmen in vielen Embedded Devices noch immer. Das macht vernetzte Geräte im Feld zu einem attraktiven Angriffsziel und verschärft den Handlungsdruck für Hersteller. (Bild: Dall-E / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/8b/a7/8ba78f02e76e08a21fe98487faa35225/0131725834v1.jpeg "Die Neugründung eines KI-Sicherheitsinstituts soll insbesondere auf die digitale Souveränität Deutschlands einzahlen. (Bild: Gemini / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/c2/db/c2db602ca0623a9c9f2a67e68394bcf4/0131926616v2.jpeg "DASYLab: Seit dem 1. Juni 2026 wird die Messtechnik-Software exklusiv von measX angeboten. Emerson hat den Vertrieb vollständig übergeben. (Bild: mewsaX)")
:quality(80)/p7i.vogel.de/wcms/99/b3/99b3d1fd155da60b5591bcfd13c933b7/0131894777v2.jpeg "Mixed-Signal- und Leistungshalbleiter: Die Dienstleistungen der Cosmic-Gruppe begleiten Kunden von der ersten Designphase bis zum End-of-Line-Test. (Bild: Cosmic Group)")
:quality(80)/p7i.vogel.de/wcms/68/f3/68f330641144fa3f03d2676d0966ca03/0131585559v2.jpeg "Wearable: Die Kombination aus multimodaler Sensorik, Embedded AI und Echtzeitfeedback schafft eine neue Form der prozessintegrierten Werkerassistenz. (Bild: Voss Automotive)")
:quality(80)/p7i.vogel.de/wcms/a7/5e/a75e118eabb30306c3f2520615dd2ff0/0131786598v2.jpeg "Keysight beschleunigt mit der Hybrid-eCall-Zertifizierung den Fortschritt in der Notfallkommunikation für die Automobilindustrie. (Bild: Keysight)")
:quality(80)/p7i.vogel.de/wcms/b4/e6/b4e65642bee36ffa767536694c20ccf4/0131920022v2.jpeg "Ein batterieloser, verkapselter Sensor funkt die Temperatur aus dem Körperinneren. (Bild: MIT News)")
:quality(80)/p7i.vogel.de/wcms/2a/71/2a71552311c8bdae374ce140712fb2d2/0131890634v4.jpeg "Ein humanoider Roboter entnimmt ein Getränk aus dem Regal und stellt es auf dem Tresen bereit. Die Demonstration auf der Bosch Connected World 2026 zeigte zentrale Fähigkeiten humanoider Systeme in einem konkreten Handhabungsprozess. (Bild: SCHUNK SE & Co. KG)")
:quality(80)/p7i.vogel.de/wcms/ba/ae/baae0558079e61bdf9aec7292c98c965/0131909060v2.jpeg "High-NA-EUV-Anlage von ASML: High-End-Fertigungstechnologie des niederländischen Ausrüstungsherstellers soll trotz Exportverboten nach China gelangt sein. ASML weist die Vorwürfe zurück. (Bild: ASML)")
:quality(80)/p7i.vogel.de/wcms/44/ad/44ad8f8b18b29422f6e68bdc261397e1/0131904972v2.jpeg "Synopsys setzt auf systembewusstes Co-Design statt Overdesign. (Bild: Synopsys)")
:quality(80)/p7i.vogel.de/wcms/a6/eb/a6ebeccaf9aeeba5c394ea3b97a21fe5/0131938098v2.jpeg "Keysight erweitert sein Photonik-Design-Ökosystem um das GlobalFoundries PDK. Damit ist es mögliich, photonisch integrierte Schaltungen und die Überprüfung der Leistung optischer Verbindungen in einer einzigen Umgebung zu simulieren. (Bild: Keysight)")
:quality(80)/p7i.vogel.de/wcms/4e/41/4e4159d1e93e67d47bd2f51a90691b23/0131548978v2.jpeg "Transformation im Engineering: KI-gestützte Systeme generieren zunehmend selbstständig Schaltschranklayouts und entlasten Konstrukteure von zeitraubenden Routineaufgaben. (Bild: WSCAD)")
:quality(80)/p7i.vogel.de/wcms/d6/ea/d6eac438c362c545cab42ef0f30bcfc0/0130136975v2.jpeg "Die Bewerbungsphase für den James Dyson Award 2026 ist gestartet. (Bild: Dyson)")
:quality(80)/p7i.vogel.de/wcms/e5/6c/e56ceb935ba09cb66a4fd0f961b2d3e9/0129642888v2.jpeg "(Bild: Vogel Professional Education)")
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/93300/93330/65.jpg "EBV_Vekt4c_Subline_3d.jpg ()")
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/76800/76895/65.jpg "FAULHABER_120mm.jpg ()")
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/68800/68851/65.jpg "Logo.jpg ()")
Systemvergleich: Absolute optische Encoder
Optische Drehgeber nutzen eine präzise Maßverkörperung und profitieren von der System-on-Chip Integration bezüglich Auflösung und kleiner Bauform. Dabei werden neben mehrspuriger Abtastung digitaler Codes analoge Signale interpoliert, um Zwischenwerte zu generieren.
Nach dem Durchlichtverfahren aufgebaute optische Geber arbeiten mit einer LED als Beleuchtung, einer Codescheibe mit mehreren Spuren sowie einem lichtempfindlichen Sensor-IC, der sowohl den Photodetektor, die Signalaufbereitung als auch Schaltkreise zur Interpolation in einem System-on-Chip kombiniert.
Standardtechnik mit digitalem Absolutcode
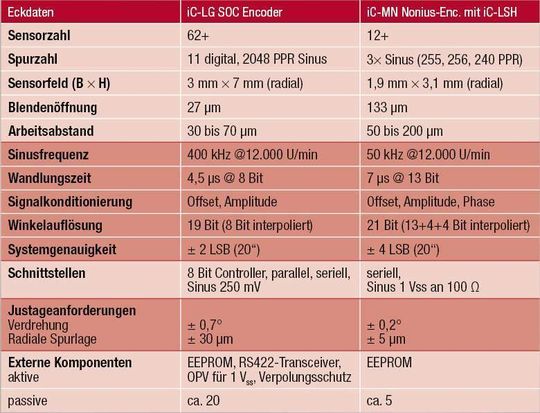
Eine sehr feine Grundauflösung wird durch eine hohe Anzahl von Teilungsperioden erzielt, die auf den Umfang der Codescheibe verteilt sind. So unterteilt beispielsweise der System-On-Chip Positionssensor iC-LG eine Umdrehung zunächst in 2048 gleiche Intervalle. Bei einer Codescheibe mit einem Durchmesser von 42 mm ergeben sich somit Strukturbreiten auf der Codescheibe um 27 µm.
Um über eine volle Umdrehung die absolute Position zu erhalten, müssen die Teilungsperioden voneinander unterschieden werden. Dazu dienen bis zu 13 weitere Spuren auf der Codescheibe, die einen digitalen Absolutcode liefern, als eindeutige Information über das Intervall.
Die weitere Verfeinerung der Position wird durch Interpolation der Teilungsperioden erreicht, wofür jede Teilung ein Sinus- sowie Cosinus-Signal bereitstellt. Durch die Berechnung der Tangensfunktion lässt sich hieraus der momentane Phasenwinkel innerhalb eines Intervalls bestimmen. Dieser kann dann mit dem digitalen Absolutcode verrechnet werden, um eine weitaus feinere absolute Positionsinformation von bis zu 21 Bit zu erhalten.
Nonius-Methode für eine feinere Auflösung
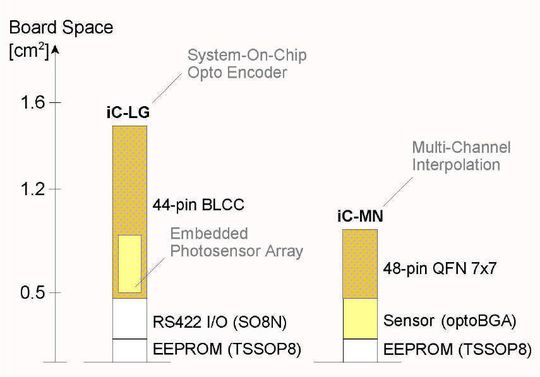
Für eine feine Grundauflösung unterscheidet auch die Nonius-Auswertung Teilungsperioden, verwendet dafür aber weitere Sinussignale anstelle digitaler Absolutcodes. Der Maßverkörperung genügen damit drei an Stelle von bisher mindestens 12 Spuren – Sensor, LED und Linse passen jetzt in viel kleinere Gerätebauformen, die neue Anwendungsfelder erschließen können (Bild 4).
Gleichzeitig bieten aktive Photosensor-Arrays wie iC-LSH hysteresefreie und klirrarme Sinussignale in HiFi-Qualität. Dies ermöglicht eine feinere Interpolation, sodass die Nonius-Auswertung auf einer reduzierten Anzahl von Teilungsperioden basieren kann.
Winkelfehler erkennen und kompensieren
Sensorsignale sind niemals fehlerfrei – für ein besseres Interpolationsergebnis ist es wichtig, relevante Signalfehler zu kennen und zu kompensieren. Typische Fehlerquellen sind ein Offset-behafteter Sensor (OS und OC), eine unterschiedliche Empfindlichkeit zwischen Sinus- und Cosinus-Sensor (Amplituden AS und AC), eine von 90° abweichende Phasenlage zwischen Sinus- und Cosinus-Signal (φSERR bzw. φCERR ) sowie Nichtlinearitäten in der Kennlinie des Sensors (Abweichungen der Sinusform FSIN bzw. FCOS).
Weitere Fehler der Maßverkörperung können hinzukommen, zum Beispiel eine Breitenschwankung der Teilungsperiode, wodurch die Länge der Sinus- bzw. Cosinus-Perioden variiert.
Allgemein lässt sich der Winkel innerhalb einer Teilungsperiode aus dem Arcustangens des Quotienten von Sinus- und Cosinus-Signal gemäß Gleichung 1 berechnen.

(Gl. 1)
Dieser Winkel wird durch die Interpolationsschaltung quantisiert. Erst aufgrund der Feinunterteilung der Teilungsperiode sind Positionsgeber mit Auflösungen von über 20 Bit pro Umdrehung möglich.
Artikelfiles und Artikellinks
(ID:265297)
:quality(80)/p7i.vogel.de/wcms/16/cb/16cb32a5386cf8fd9f4dc7d18c669dc7/0131304281v2.jpeg "Der iC-MUE ist ein magnetischer Absolut-Encoder-SoC. Er adressiert das komplexe Anforderungsprofil moderner Robotik- und Motorfeedbackanwendungen. (Bild: iC-Haus)")
:quality(80)/p7i.vogel.de/wcms/7c/04/7c04916c305164fb10bc6cb05b51d934/0130431065v2.jpeg "Bei der Sensor-Integration setzen Entwickler auf hochintegrierte magnetische (Hall/TMR) und induktive Sensor-Lösungen. Der Beitrag zeigt wertvolle Design-Tipps für die Signalauswertung im Mikrocontroller. (Bild: frei lizenziert)")